
 起点课堂会员权益
起点课堂会员权益人人都能看懂的路径匹配算法
在实际应用中,导致定位与地图道路存在偏差,其主要的原因还在于GPS数据采集的质量问题。由于这些问题非常普遍,因此我们需要在这种情况下仍然能实现较高的路径匹配准确率。那么,如何通过算法来实现呢?

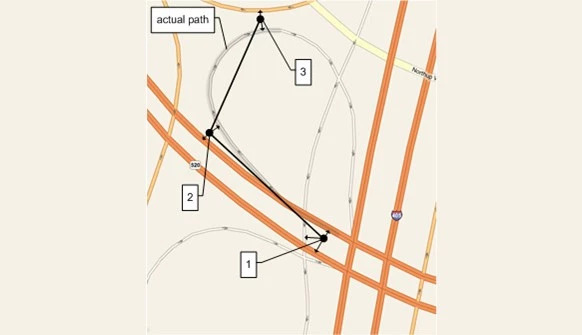
试想一下,一辆汽车行驶在道路上,1、2、3这三个点是汽车的GPS定位结果,我们可以看到三个点的定位、形成的轨迹和实际道路有非常明显的偏差。
这就是常见的,定位轨迹与地图道路的匹配问题。相信大家都有通过饿了么点外卖,或者京东购置大件物品的经历,当我们想要查看外卖骑手和配送员的距离位置,平台往往只是在地图上由配送点到收货地址划一条直线,用户无法看到骑手完整的行驶轨迹,显示的定位与道路也常常有明显的偏移。

主要的原因可能是因为在外卖和送货上门的场景下,不太需要做精准的轨迹与道路匹配。
路径匹配不准的原因
在实际应用中,导致定位与地图道路存在偏差,其主要的原因还在于GPS数据采集的质量问题。GPS采样频率低、定位误差大、GPS信号丢失,都会增加路径匹配的不准确性。由于这些问题非常普遍,因此我们需要在这种情况下仍然能实现较高的路径匹配准确率。
那么,如何通过算法来实现呢?
路径匹配的算法实现
1. 异常点监测
通过异常值检测算法,检验行车GPS轨迹数据中的错误数据和不合常理的数据,剔除异常值再进行计算分析。

2. 观测概率
观测车辆GPS轨迹点与周围多条道路的距离、以及道路的连续性等因素,计算出车辆行驶的正确道路。
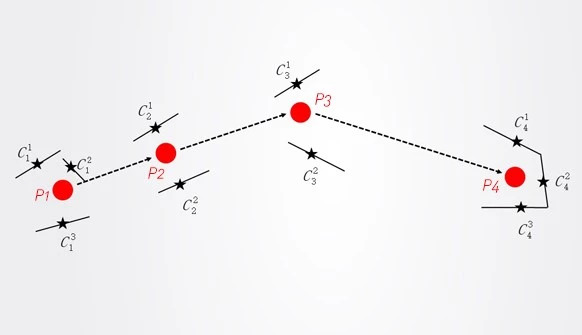
我们计算红色的GPS点P1、P2、P3、P4与周围道路C1、C2、C3、C4的距离,根据距离确定GPS点实际位于哪条道路的概率,距离近,概率就高。同时还将考察道路的连续性,例如:两个GPS点P2、P3最为接近的是C2(1)、C3(1)两段道路,但这两段并不是一条连续的道路,这个时候就不能单纯采用最近距离来判断概率。
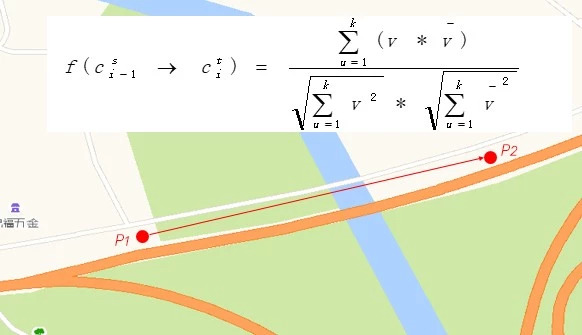
3. 速度权重
当GPS点出现在高架路段,通过定位就比较难判断具体的道路。通过车辆速度权重,可以计算出车辆行驶在高架或地面道路的准确位置。
最后在实际的应用中,我们积累完善了丰富详尽的地图道路数据库,建立了数据索引,使得计算效率极大提高,并且采用了效率极高的最短路径算法,计算速度拥有更大提升。
车辆GPS轨迹的地图匹配是交通大数据挖掘中的一项重要的基础性工作,可靠的轨迹匹配结果对于道路交通运行状态监测、实时交通信息发布、车辆定位与智能调度、出行路径选择行为分析等具有重要意义。
由于城市道路网络中大量存在高架路、主辅路和立体交叉等复杂的道路场景,对准确的路径匹配提出了更高的要求,相信通过我们对数据算法的持续训练完善,可以不断在各个应用领域发挥价值。
本文由 @ jmto 原创发布于人人都是产品经理。未经许可,禁止转载
题图来自Unsplash,基于CC0协议






- 目前还没评论,等你发挥!

