
 起点课堂会员权益
起点课堂会员权益人与机器人的渐进式交互研究
百度人工智能交互设计院以“机器人”为研究对象,对人-机器人的交互体验进行了系列研究。本次我们将撷取“在公共场合,人与服务机器人的自然交互”这个主题分享我们的研究和思考。
从古至今,机器人一直承载着人类巨大的梦想。随着各类传感器、语音交互、机器识别、SLAM等技术的蓬勃发展,机器人开始从科幻作品中走出,走进人们的生活。

8月16日,在世界机器人大会上发布的《中国机器人产业发展报告(2018)》显示:2018年,全球机器人市场规模将达到298.2亿美元,2013至2018年平均增长率约为15.1%。机器人市场持续升温,机器人的时代正在来临。


百度人工智能交互设计院以“机器人”为研究对象,对人-机器人的交互体验进行了系列研究。本次我们将撷取“在公共场合,人与服务机器人的自然交互”这个主题向业界分享我们的研究和思考。
导读:
- 人-机器人交互的目标:自然,贴近人的认知习惯;
- 人-机器人交互的研究方法:自然观察、参与式设计和实验法;
- 人-机器人交互的设计建议:渐进式交互。
前言
在公共场合,人们与机器(如ATM机)交互时,更倾向于将机器视为工具,有交互需求,但无交流期待。而当面对机器人,尤其是人形机器人时,人们更倾向于将其视为类人体,有交流的期待,更渴望自然的互动。
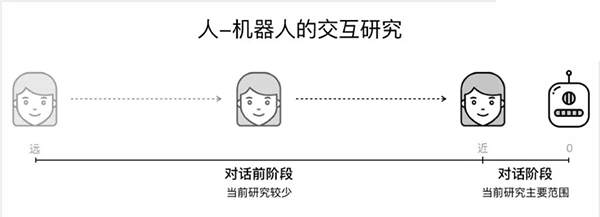
目前人-机器人交互的研究主要聚焦在“对话阶段”,如:语音识别、语义理解、需求满足等等,而对“对话前阶段”涉猎很少。对话前阶段同样至关重要,它关系到人对机器人的“第一印象”,更是对话能否顺利开启的前提与基础。
那么,在人由远到近走向机器人的过程中,机器人:
- 是否需要与人交互?被动等待还是主动出击,抑或做些什么吸引用户的注意?
- 如何与人交互?微笑还是眨眼,挥手还是打声招呼,抑或使用各类传感器和AI能力寻找合适的交互时机?
这些问题是我们本次将重点展开探讨的内容。
人-机器人交互的目标:自然,贴近人的认知习惯
比尔盖茨曾说“人类自然形成的与自然界沟通的认知习惯和形式必定是人机交互的发展方向”,我们终将以自然的方式与机器人交流。
研究之初,我们梳理了心理学、社会学的相关研究成果,以及服务行业的实践成果。基于此,我们对公共场合中,人与服务人员的互动方式进行了溯源,并提炼了人际互动的基本规则。
在了解规则之前,大家不妨回忆下自己在公共场合和各类服务人员的交往经验,哪些让你感觉不错,哪些让你觉得不爽甚至恼怒?我们调研发现,大家感受不好的服务体验主要有两类:
类型1:热情过度,服务过度
一直盯着/亦步亦趋地跟着/时不时的各种介绍/……
类型2:冷冰冰,爱搭不理
基本不看我/冷冷地扫我一眼/对我的问题爱搭不理/……
而大家普遍感受较好的服务体验也表现出了共性:主动、热情,有分寸。
刚看到我会点头微笑/主动打招呼/有需要主动上前/无需要不会打扰/……
如何让人们感受到主动、热情,又在心理上营造恰如其分的分寸感呢?作为公共场合的服务人员至少需要遵循以下2大规则:
(1)维持恰当的空间距离很重要
心理学家发现,每个人都有保护个人空间的本能,在公共场合这种本能尤其强烈。一旦个人空间受到侵犯,人就会感到不舒服、甚至愤怒起来。
爱德华·霍尔在其经典著作《无声的语言》(1959年)一书中,将日常生活中人与人的空间距离划分为四类:亲密距离、个人距离、社交距离和公众距离。每种距离又有“近端”和“远端”之分。
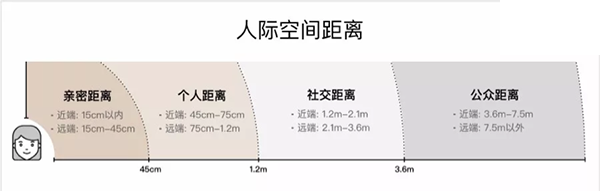
- 亲密距离是人际交往的最小间隔,通常只限家中等个人情境,只限情感上联系高度密切的人之间使用。尤其是近端,通常只允许情侣或孩子进入。
- 个人距离是朋友间沟通的恰当距离。通常陌生人进入近端会构成侵犯;而远端,熟人和陌生人都可以进入。不过熟人更靠近远端近点(75cm)一侧,而陌生人则更建议靠近远端远点(1.2m)一侧。
- 社交距离又称礼貌距离,体现出一种社交性或礼节上的正式关系。通常的社交活动一般都保持在社交距离的近端;远端适用于更正式的场景,如:面试、谈判。
- 公众距离是公开演讲中演讲者与听众保持的距离,并不适合人际沟通。在7.5m以外,几乎是容纳任何人的空间。人们在这个空间内,完全可以对其他人视而不见。
(2)礼仪很重要,表情动作是精髓
孔子曰“不学礼,无以立”。在所有行业中,服务业对礼仪的重视程度尤其高。服务人员遵循的礼仪分为:仪容仪态、表情动作、语言、常见礼节四大模块。
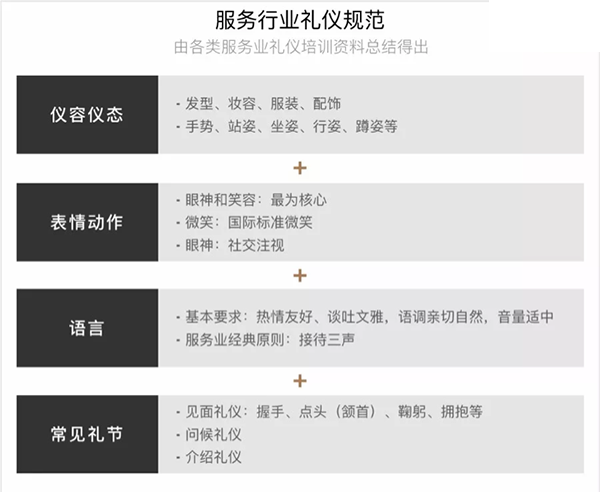
在这些服务礼仪中,表情动作起着至关重要的作用。微笑是社交中最受欢迎、最具吸引力、最有价值的表情,真诚、温暖、自然的微笑能有效的拉近人与人之间的距离。眼神是最生动、最善于传情达意的表情,眼神注视接触时长不同、停留部位不同、眼神变化均会带来不同的感受。
常见礼节则明确了在不同场景下(如见面、打招呼、介绍),表现尊重的惯用形式和具体要求,非常具有可操作性。
服务业有许多基于交往距离和礼仪来定义交互方式的成功案例,比如:
- 沃尔玛的“三米微笑原则”:每当你在3米内遇到一位顾客时,要微笑,要看着他的眼睛与他打招呼,同时询问你能为他做些什么。
- 万豪国际酒店的“15/5规则”:与客人相距15步时,主动向客人微笑并进行注目礼;与客人相距5步时,尽可能停下来,靠边站,点头及主动问好。
那么,人际交往中的距离和礼仪规则是否适合人-机器人交互?如何将这些规则提取转化,形成适合机器人表达的方式?这是需要深入思考的问题,为此我们做了研究和验证。
人-机器人交互的研究方法:自然观察、参与式设计和实验法
为了探索在公众场合,用户走向机器人的过程中对机器人的真实期待,我们使用了自然观察、参与式设计、深度访谈和实验法来开展研究。
本次研究中,以小度机器人为研究载体。小度机器人依托百度的人工智能,集成了自然语言处理、对话系统、语音视觉等技术,能够流畅的与用户进行信息、服务、情感等多方面的交流。并且,小度机器人作为百度的“正式员工”,在百度公司的大厅担任迎宾的重要角色。

- 首先,我们在真实的公共场合(百度科技园K2),观察在无人为干扰的情况下,不同用户走向小度机器人时,他们与小度互动行为和方式,并对这些行为进行提取、编码和分析。
- 随后,我们邀请若干用户进行了深度访谈和参与式设计。在引导用户走向小度机器人的过程中,要求他们自我报告对小度的需求和期待,共同探讨小度更为理想的表达方式。
- 最后,我们综合用户的需求和期待以及人际交往中的各类规则,将其转化成小度的“行为语言”,并且进行了实验验证。我们设置了各种实验场景,用户在走向小度机器人的过程中,会体验到不同的人机交互方式。
实验过程中,我们追踪了用户的面部表情、肢体动作、言语行为等。实验结束后,要求用户对各类交互方式进行评估,包括情绪体验、认知评价、主观满意度等等。最终获得了本次研究的结果。

人-机器人交互的设计建议:渐进式交互
我们发现,在与小度机器人的互动中,用户更期待小度主动释放交互信号,并且这种交互信号的释放是一个渐进的、不断增强的过程,我们将此过程称之为“渐进式交互”。
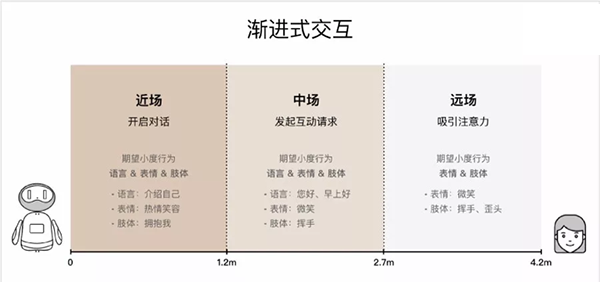
特别说明的是,这种“渐进”并不仅仅是物理距离上由远及近的变化,而是用户“心理场”的渐进变化。用户“心理场”的变化主要分为以下三个阶段,按其在“心理世界”出现的先后顺序将其命名为远场、中场和近场。
- 远场阶段:机器人需要吸引到用户的注意力,让用户清晰地意识到“Ta看到我啦”。这是至关重要的一步。如果无法吸引到用户的注意力,接下来的人-机交流将变得突兀甚至无法进行。
- 中场阶段:机器人需要进一步“发起互动需求”,让用户明确意识到“Ta眼中只有我”,Ta有进一步和我互动的需求。这也会促使用户下意识的进一步走向机器人。
- 近场阶段:如果机器人“开启对话”,则会让用户深刻感受机器人的主动和友好,“Ta来撩我啦”,人和机器人之间的对话自然而然的开展起来。
心理场在物理世界的表征:距离上的渐进
同时,我们发现,用户的心理场在物理世界的表征也体现了距离上的渐进。其中,远场对应的距离约为2.7-4.2米,这个距离内,用户希望小度机器人传递吸引注意力的信号。
中场对应的距离约为1.2-2.7米,这个距离内,小度机器人最好让用户意识到小度想和他/她进行进一步互动。而近场对应的距离则在1.2米左右,这个时候用户已到达和小度开启对话的恰当距离。
人和机器人交互的距离要求和人际交往距离略有不同,远场距离(2.7m-4.2m)超过了社交距离的远端(3.6m),落在了公众距离的近端。之所以如此,推测与小度机器人本身的特点有关,比如小度身宽1.1m,较之一般人要宽大很多。
心理场在物理世界的表征:期待的交互形式体现了对礼仪的诉求
在不同的心理场,用户期待小度机器人做出的交互形式也有所不同。而这些交互形式带有明显的礼仪要求。
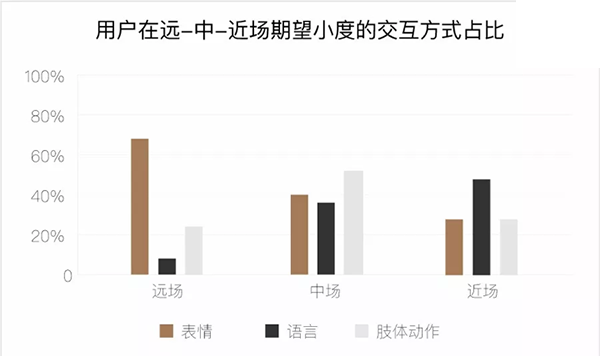
在远场,用户更期望小度使用“表情”和“肢体动作”来吸引注意力。比如微笑、友好的眼神的对接;挥手、歪头、点头等等。
在中场,用户期待小度可以以多种形式组合发出互动信号,让用户明确意识到小度的互动对象是自己。比如,使用语言打招呼(如早上好、您好);微笑、挥手等表情和动作期待继续保留。
而在近场,语言的作用更为突显。这个时候,用户期待小度先“开启对话”,如介绍自己,询问是否需要帮助等。此时用户期待小度有更热情的微笑和肢体动作(比如握手、拥抱等)。
对于不同的交互方案,我们进行了实验验证,包括但不限如下问题:
- 不同距离下使用何种表情更佳,表情设计时需要遵循的普适性原则;
- 语言在哪个心理场出现更佳,语音通道对用户体验的影响;
- 各类传感器和AI能力的应用(如人脸识别)能否带来用户体验的增益。
以上问题的研究成果和交互建议,百度人工智能交互设计院将在未来的文章中或者适当的场合中予以更多的分享和披露。
小结
本次研究,我们聚焦公共场合,以小度机器人为载体,探索了人-机器人对话前的自然交互模态,并提出了一种新的交互理念——渐进式交互。我们认为,这种交互理念的核心是对用户心理场的解读,以及心理场在物理世界的各类表征的探索。
本文TIPS :
(1)人-机器人交互的目标是自然、贴近人的认知习惯。在公共场合,人们很看重维持适当的空间距离和遵守礼仪。
(2)与机器人的交互中,用户更期待“渐进式交互”,即机器人主动释放交互信号,且交互信号是渐进的、不断增强的过程。
(3)渐进式交互核心满足用户“心理场的变化”,按照其在心理世界出现的先后顺序分为:
- 远场:机器人需要“吸引注意力”,与人之间的物理距离约为2.7-4.2m,更适合使用表情和肢体动作。
- 中场:机器人需要“发起互动需求”,与人之间的物理距离约为1.2-2.7m,更适合使用肢体动作、表情和语言等多种方式。
- 近场:机器人需要“开启对话”,与人之间的物理距离在1.2m左右,此时语言的作用更为突显。
人-机器人交互研究的内涵深厚,外延也在不断扩展中。本次研究主要聚焦在公共场合,小度机器人本身的外形和产品也会对用户产生一定影响。后续我们将进行更多扩展研究,如探索家庭场景下的人机交互、不同形态机器人对用户体验的影响,等等。
在刚刚过去的2018年世界机器人大会论坛上,意大利比萨圣安娜大学教授Paolo Dario表示:“下一个时代不再是互联网,而是机器人”,未来机器人领域将会有巨大的潜力和发展空间。我们也将在人-机器人交互这个领域持续探索,用心去雕琢人机交互中的每个细节。
本文由 @ AIID(百度) 原创发布于人人都是产品经理。未经许可,禁止转载
题图来自Unsplash,基于CC0协议









提几个问题:
1.本文只是简单的分析了单个人的人机交互,既然是公共场合,为何不谈论多个人的场景呢?多个人在小度身边岂不是更复杂,更好玩,那么我也相信提出的解决方案会更加有趣;
2.本文的渐进式交互更多的是想凭借人们的经验试图让机器理解人的行为,心理活动,类似于打标签的监督学习去训练小度;(这样的话,想要达到好的效果,必须有大量的样本,本文并没有在这方面做更多的阐述,所以得出的结果未免片面了些!)
综上两点,期待作者的下篇!(我想这样的话,文章会更加饱满,更具有深度!) 🙂
不像是大厂的研究结果,更像一个本科生的开题报告。百度加油