
 起点课堂会员权益
起点课堂会员权益思考 | 服务型机器人如何设计
编辑导读:现在很多商场都有贴着卡通表情的机器人,它们能完成对话、导航等简单的任务。这样的服务型机器人如何设计得更好呢?本文作者对此展开了分析,一起来看看吧。
我们在逛商场的时候,经常会看到那些迎面而来,面带卡通表情的小机器人,也给用户带来的许多惊喜。
每当看到这些服务型的小机器人的时候,就常常在想针对这样的产品,设计的发力点在哪里呢?如何可以设计的更好,为用户提供更好的服务。
本文分享的就是关于服务型机器人如何设计的一些思考。
一、市场调研
出于好奇,期望可以快速了解智能机器人这个行业,有去查阅相关的行业报告,利用桌面调研的方法,建立对这个行业的认知。
通过调研,了解到:
- 在我国服务型机器人市场规模已达394亿元;
- 大量的餐饮行业利用智能机器人缓解人工成本的压力,同时也为客户带来了更多新奇的体验;
- 同时餐饮行业的痛点以及疫情的爆发更增加了服务型机器人的需求量。

二、用户调研&设计策略
1. 了解用户的想法
那么,接下来就是想了解现在餐饮行业所使用的服务型机器人在用户心中是什么样子的呢?
在实地观察中发现,服务型机器人对小朋友的吸引还是很大的。他们会更喜欢围着机器人玩耍,跟它互动。那么针对大人来说其实实用性就没那么高,或者说并没有满足大部分人们的期望,在大人们的眼中,服务型机器人仅仅只是一个大型玩具,一个打发等待时间的玩具。
针对与商场中与用户的聊天,也了解到了他们真实的感受:
- 用户1-儿童:他们很喜欢,并且可以很快速的了解机器人的功能以及掌握与机器人互动的方法,同时也很愿意将他们所知道的介绍个旁边的其他人,即使是素不相识的路人,讲解机器人的功能也成为了他们极大的乐趣。
- 用户2-大人:带着孩子的大人为机器人停下脚步的概率会大一些,但他们可能更多的时候是看着小朋友玩。在开始的时候会觉得新颖,但其实并没有用过它的核心功能,像点菜这种。
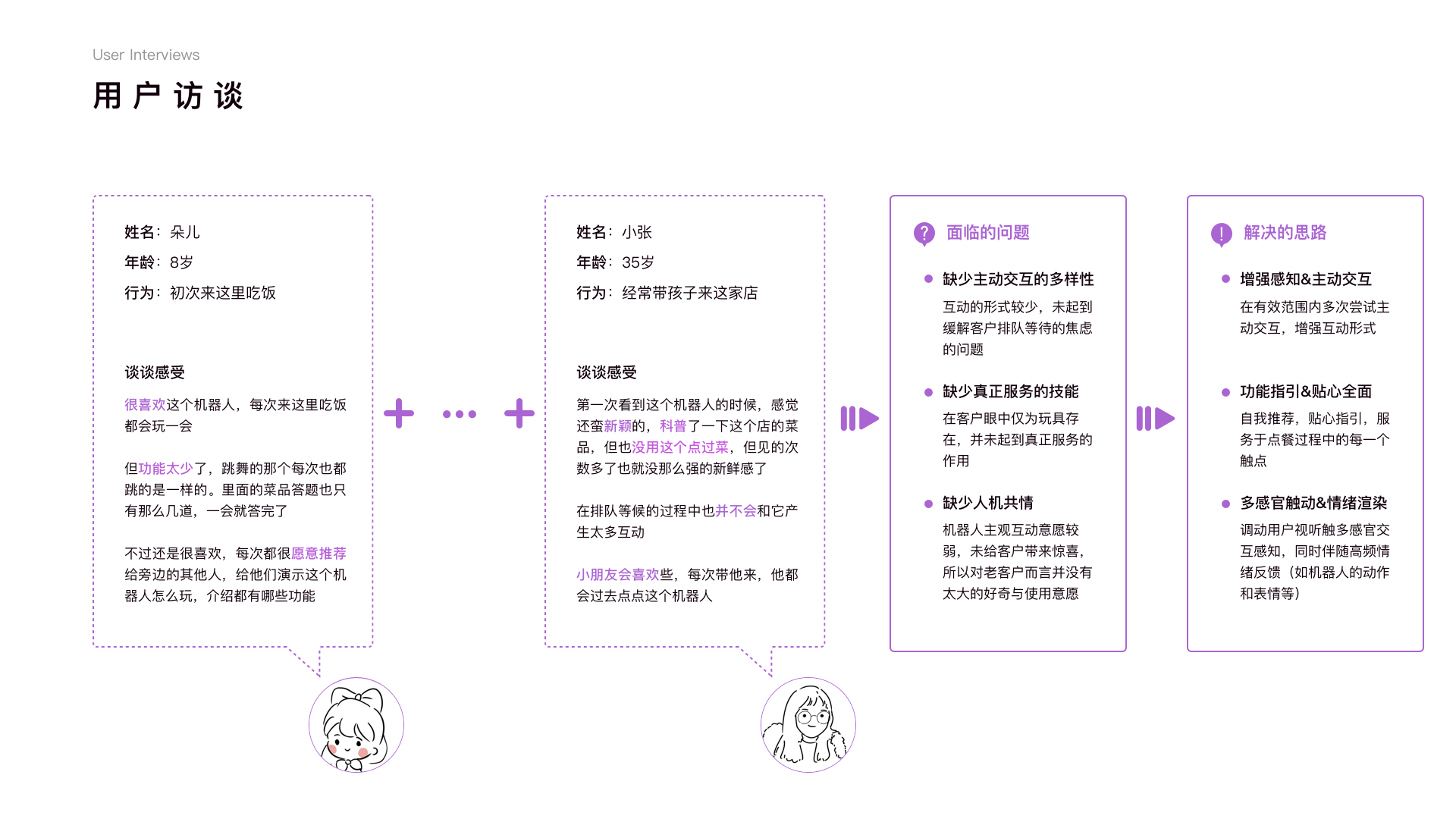
2. 提炼当前的问题
服务型机器人并没有起到真正的服务的作用,绝大多数其实是供用户娱乐,所以也没有起到释放人工劳动力的作用。
那么,进行问题拆解,主要是因为哪几个问题导致这样呢?
- 缺少主动交互的多样性:互动的形式较少,未起到缓解客户排队等待的焦虑的问题
- 缺少真正服务的技能:在客户眼中仅为玩具存在,并未起到真正服务的作用
- 缺少人机共情:机器人主观互动意愿较弱,未给客户带来惊喜,所以对老客户而言并没有太大的好奇与使用意愿
3. 定义设计策略
基于以上分析的当前所面临的问题,设想的解决思路为:
- 增加感知&主动交互:在有效范围内多次尝试机器人与用户的主动交互,增强互动形式。
- 功能指引&贴心全面:机器人要时刻做好自我推荐的工作,让用户了解到ta自身可以提供怎样的服务,同时进行贴心指引,服务与点餐过程中的每一个触点。
- 多感官触动&情绪渲染:调动用户视听触多感官交互感知,同时伴随高频情绪反馈,从更多的角度感染用户。
三、用户场景优化
通过观察发现,用户的路径主要为四步:进店-点餐-等待-离开。
原机器人所服务的场景仅覆盖进店、点餐、等待三个环节,分别通过打招呼、菜品介绍和点餐指引、小游戏(猜菜单)和才艺展示的交互方式与用户互动。
通过场景中机器人与用户的交互可以看出来,进店以及等待环节与用户交互行为不够丰富,在进店环节缺少更多的热情及欢迎的氛围烘托,等待环节的交互频次其实还可以更高些。
所以优化的方案主要为:
- 进店环节-主动交互,吸引用户:让机器人与用户的互动尽量形成一个闭环,主动进行菜品推荐,提供用户最想了解的内容。
- 点餐环节-功能指引,服务周到:指引用户可以快速完成点餐任务,体验到机器人服务的速度。并给予更多的卖萌表情作为操作反馈,提供更多的情绪价值。
- 等待环节-调皮卖萌,人机共情:帮助客户打发等待的时间,则需要提供更多的情感共鸣,可设计些小游戏。
- 离开环节-情绪渲染,记忆彩带:根据峰终理论,任务结束时用户体验的好坏影响用户对整个任务流程体验的评价,所以在用户离开时,创造些彩蛋尤为重要,可有些离别的文案等。

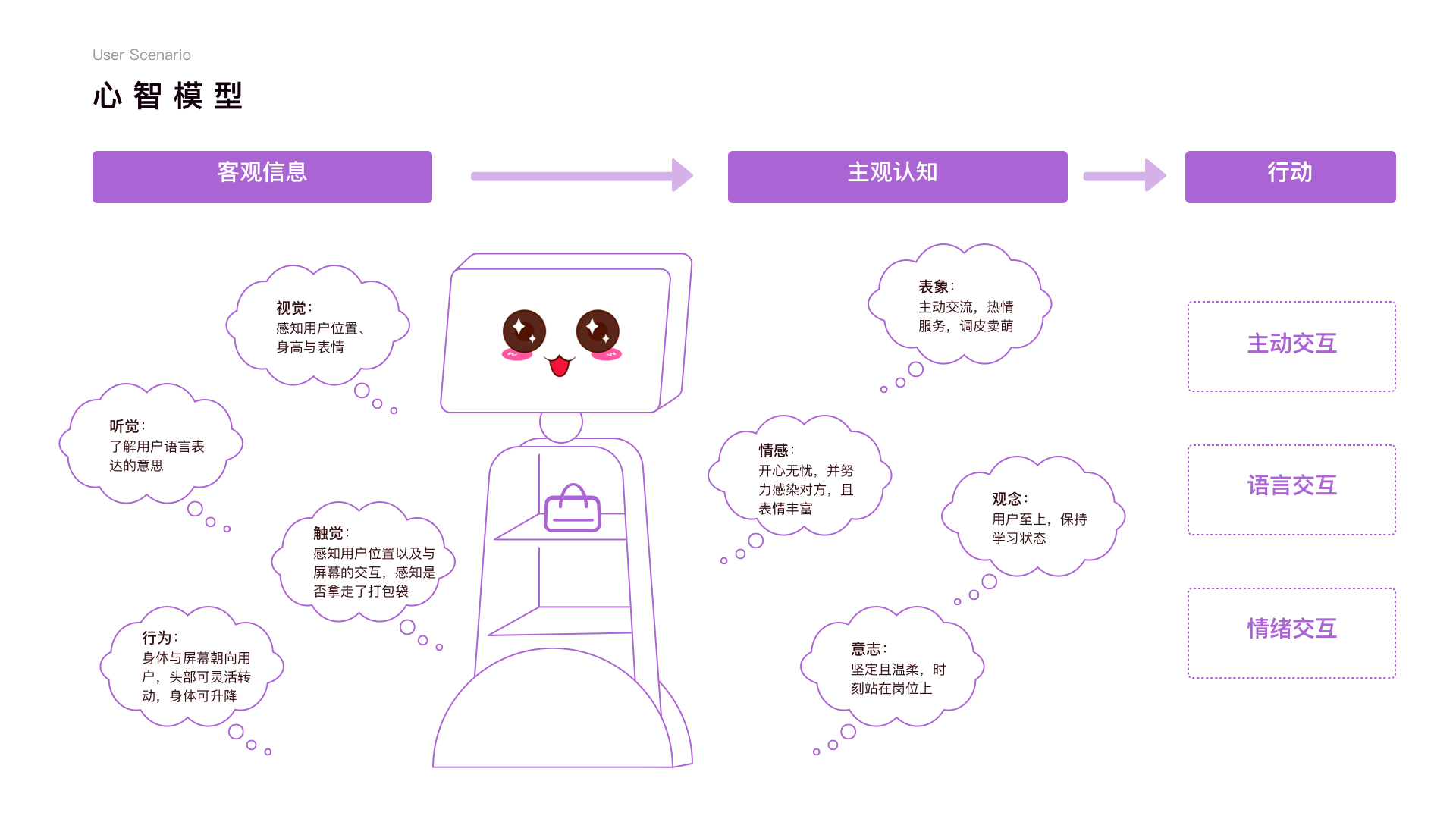
四、关于心智模型的思考
对于智能机器人的设计,如果从创建心智模型的角度作为切入点,是否可以让机器人更立体,可以更好的为用户服务呢?我想应该会吧。
关于人的行为的产生,其实主要是人类通过对周围客观信息的采集以及加上自我主观认知的判断,从而指挥身体进行行动。那么主观认知对客观信息的判断的依据主要是由心智模型判断的。
所以如果对机器人建立完善的心智模型,则可以让机器人在处理不同场景中的事件的时候按照我们所期待的样子行动,为用户提供我们所期待的服务,也就是说可以更加智能化化,更加起到服务的作用,降低人效。
客观信息的采集来源主要为:视觉、听觉、触觉、行为。主观认知判断主要为:表象、情感、观念和意志。我们将采集到的客观信息与我们所期望机器人产生的主观认知相匹配,就可以使机器人进行我们所期待的交互行动。
在不久的将来,应该会有更多的机器人被生产出来为我们提供更加便利与人性化的服务,这种具有心智模型的机器人也应该会更普及、更智能。
附:
服务型机器人相关报告:
http://news.sohu.com/a/557461296_121308133
https://www.sohu.com/a/562868235_121424169
http://www.199it.com/archives/1456964.html
本文由 @哈哈 原创发布于人人都是产品经理,未经许可,禁止转载。
题图来自 Unsplash,基于 CC0 协议。









好好
如果对机器人建立完善的心智模型,则可以让机器人在处理不同场景中的事件的时候按照我们所期待的样子行动
市场上服务型机器人应用最多的估计就是餐饮和住宿行业,更广范围的应用在接待场景。