
 起点课堂会员权益
起点课堂会员权益智慧医疗硬件实战:ALAYA脊柱手术机器人核心架构与从0到1开发全流程拆解
在医疗器械的创新金字塔中,手术机器人无疑是塔尖的明珠;而在手术机器人领域,脊柱手术机器人则是那块最难啃的硬骨头。本文将我司与Cyber Surgery公司共同开发的ALAYA脊柱手术机器人项目分享给大家,深度拆解脊柱手术机器人(以 Cyber Surgery 的 ALAYA 系统为例)的核心功能矩阵,并完整复盘从概念定义到商业化落地的 36个月全生命周期开发SOP。无论你是正准备入局的AI产品经理,还是深耕医疗器械多年的老兵,这篇超万字的硬核实战指南,都将为你提供一份极具价值的“避坑与通关”地图。

在距离中枢神经仅有几毫米的脊柱上打入数根长达数厘米的钢钉,是一种怎样的体验?
任何一位资深的骨科或神经外科医生都会告诉你:这就像是蒙着眼睛,在悬崖边走钢丝。 传统的脊柱融合手术,高度依赖医生的“手感”和“经验”。为了确认椎弓根螺钉的位置,医生必须在手术过程中频繁使用X射线(C型臂)进行透视。这不仅意味着极长的手术时间和高强度的体力消耗,更可怕的是,医生和患者都暴露在巨大的辐射风险之中。即便如此,徒手置钉的偏差率在复杂病例中依然居高不下,一旦螺钉偏离轨迹伤及脊髓或神经根,患者面临的将是终身瘫痪甚至死亡。
这就是医疗领域最极致的痛点:容错率为零,代价极高。
随着人工智能、空间定位追踪、5G通信以及高精度机械臂技术的成熟,医疗机器人应运而生。它们不是来“替代”医生的,而是为这些“拆弹专家”提供了一双透视的“超级眼睛”和一双永不颤抖的“超级手”。
然而,作为一名医疗器械产品经理(PM),当你站在这个充满诱惑的赛道起点时,你面对的绝不仅仅是酷炫的技术堆砌。医疗机器人的开发,是一场在“极客式的技术狂奔”与“保守且严苛的医疗合规”之间寻找精妙平衡的极限拉扯。 你不仅要懂传感器、懂算法、懂机械传动,你还要懂医生在无菌手术室里的认知负荷,更要懂FDA、CE、NMPA那厚如字典的法规条文。
今天,我将基于我司与Cyber Surgery公司共同开发的案例—— ALAYA脊柱手术机器人的开发全过程,为你深度拆解这款旨在实现“无缝脊柱融合手术的创新型机器人导航系统”是如何从0到1炼成的。
一、脊柱手术机器人的四大核心功能矩阵(业务架构拆解)
在着手画原型图或写代码之前,产品经理必须深刻理解业务的“核心价值交付物”是什么。一个成熟的现代脊柱手术机器人,其系统架构通常由以下四大核心功能模块构成:
1.1 手术导航与智能规划 (Surgical Navigation and Planning) —— 机器人的“大脑”与“透视眼”
这是机器人的基础,也是产品价值最直观的体现。
临床痛点:传统手术中,医生脑海中的三维解剖结构与实际切开后的解剖结构存在偏差,且无法实时“看”到骨骼内部。
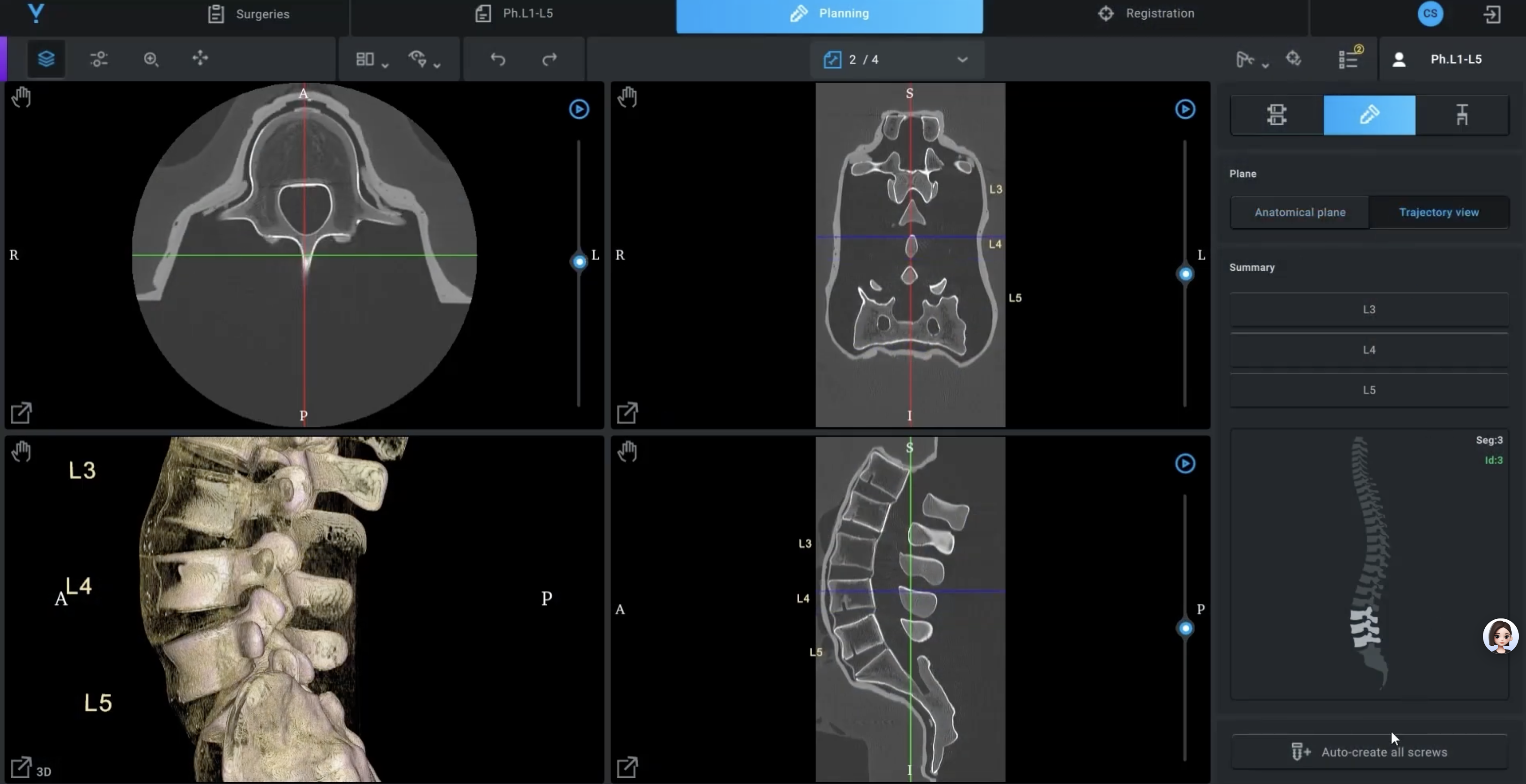
核心功能:通过产品用户界面(UI),系统将患者的术前CT/MRI数据重建为高精度的3D模型。产品经理需要设计一套极其直观的辅助工具,让外科医生能够在术前于电脑前“预演”手术——选择合适尺寸的椎弓根螺钉,精确规划其在患者椎骨中的置入位置、角度和轨迹。
术中执行:在手术中,系统通过空间定位技术(如光学或电磁追踪),实时比对患者实际体位与术前3D模型,根据预先定义的轨迹,引导机械臂到达指定位置。
1.2 微创执行与机能增强 (Minimally Invasive Execution and Augmentation) —— 医生的“超级手”
如果导航解决了“去哪儿”的问题,微创执行则解决了“怎么干”的问题。
物理级增强:机器人的机械臂具有高达7个自由度(DOF)的手腕灵活性。与软组织腔镜机器人不同,脊柱机器人通常采用“导航定位+被动/半主动执行”模式,机械臂锁定至精准的空间导向轨迹后,由医生顺着导向套筒进行钻孔和打钉,既保留了医生钻骨时的物理“手感”,又消除了手部震颤,实现亚毫米级的操作精度。
临床价值:这种高精度意味着原本需要大“切开”的手术可以通过几个小孔完成,极大降低了手术的侵入性和术后恢复时间,同时将患者与医生的X射线暴露频次降到了最低。
1.3 术中影像无缝集成与全息导航 (Imaging Integration & AR/MR Navigation) —— 打造数据闭环与上帝视角
这是高端骨科手术机器人未来的决胜局。
数据闭环架构: 系统必须能够与术中O型臂、3D C臂等移动影像设备进行无缝集成与自动配准。当术中骨骼位置发生位移时,系统能瞬间抓取最新影像并自动更新导航轨迹。
增强现实体验: 传统导航需要医生不断抬头看屏幕(手眼分离)。前沿的脊柱机器人系统正逐步结合增强现实 (AR) 或混合现实 (MR) 头显设备,将规划的置钉轨迹、深度等数据直接全息投影在患者的手术切口处,真正为医生开启“透视上帝视角”,极大降低了空间转换的认知负荷。
1.4 虚拟现实 (VR) 手术培训 —— 零风险的“试错实验室”
医疗硬件产品的销售瓶颈往往在于医生的学习曲线太长。
降本增效: VR手术培训应用通过提供高度逼真的3D解剖模型和完全容错的虚拟环境,使刚接触该系统的主刀医生能够无风险地练习各种复杂的手术策略。
进阶体验: 优秀的产品经理会要求研发集成力反馈(Haptic Feedback)手柄,以模拟组织张力和钻入骨骼时的阻力感,并利用AI系统分析运刀轨迹,加入评级系统来提升学习动力。
二、脊柱手术机器人开发SOP——36个月从0到1的硬核落地指南
了解了目标,接下来就是最艰难的攀登。医疗机器人产品的生命周期管理极度复杂,它是一个有着极高监管门槛的临床项目。我们将以 ALAYA 脊柱手术机器人助手的真实开发历程为蓝本,拆解这横跨三年的6大阶段。
阶段一:需求发现与概念定义 (Discovery & Concept Definition)
时间节点: M1 – M3 在项目启动的最初三个月,产品经理的唯一任务是“不要写一行代码,不要画一张图纸,去手术室里待着”。
挖掘真痛点: 亲眼看到医生穿着几十斤重的铅衣大汗淋漓的样子,你才能明白“降低X射线暴露”是实实在在的用户痛点。
确立产品定位: ALAYA 被明确定义为“用于无缝脊柱融合手术的创新型机器人导航系统”。团队确定了颠覆性的跟踪系统和面向用户的操作系统两大核心竞争力。
PM交付物: 包含严格用例的《ALAYA 产品需求文档 (PRD)》、《临床痛点与竞品分析报告》。
阶段二:系统架构与用户体验设计 (Architecture & UX Design)
时间节点: M4 – M6 这一阶段,产品设计分为“显性”和“隐性”两条战线。
显性战线(场景化UI/UX设计): 必须区分术前与术中场景。在术前规划阶段(医生办公室),软件必须支持在电脑前的高效拖拽与3D模型旋转;而在术中执行阶段(无菌手术室),副屏UI 必须支持医生戴着带血的双层医用手套,隔着无菌保护套进行精准的触屏点按,按钮尺寸、色彩对比度、防误触机制必须做到极致的“低阻力”。
隐性战线(合规与安全底线): 在架构 Day 1 引入内置安全功能,设计多重要素身份验证 (MFA)、端到端数据加密,建立网络隔离机制,防止黑客攻击和勒索软件。
PM交付物: 高保真原型交互图、《系统底层架构与网络安全规划书》。
阶段三:原型开发与可行性验证 (PoC & Feasibility)
时间节点: M7 – M12 进入硬件验证深水区。目标是用最小成本证明核心技术可行。
机械追踪验证: 开发出能够紧密连接到患者椎骨上的机械跟踪器原型,无论患者如何呼吸或轻微移位,都必须精准反馈实时空间位置。
系统通信排雷: 测试控制台与机械臂之间双向通信的稳定性,排查高延迟或丢包风险,确保后续数据的准确性。
PM交付物: 具备基础导向功能的最小可行性原型 (PoC)、极端情况下的《追踪有效性测试报告》。
阶段四:全面开发、精度校准与系统集成 (Development & Calibration)
时间节点: M13 – M20 这是最痛苦、耗时最长的阶段。软硬件全部要缝合在一起。
突破精度瓶颈: ALAYA 在开发中面临轻巧型机械臂刚性不同导致的校准难题。PM 果断决策引入外部技术——与 Tekniker 技术中心合作,定制基于激光跟踪技术的校准软件,成功将精度提升 50%。
PM交付物: ALAYA Beta版全功能软硬件集成系统、《Tekniker-ALAYA 精度校准与优化报告》。
阶段五:临床试验与监管审批 (Clinical Trials & Regulatory)
时间节点: M21 – M30 医疗器械的通行证是监管认证。PM 的工作重心转向“法规博弈与临床试验”。
严苛的人体临床: 在经历了无数次假骨与动物实验后,ALAYA 团队首先获得了西班牙药品和健康产品局 (AEMPS) 的临床试验批准。在多家大学医院开展了患者人体临床试验,雄辩地验证了超越人手的精准度与极高的安全性。
攻克监管高地: 拿到无瑕疵的临床数据后,迅速向具有资质的第三方公告机构 (Notified Body) 提交技术文档 (Tech File) 审查。经过漫长而严苛的排队与审核,最终成功斩获欧盟 CE (MDR) 认证。同时规划 FDA 510(k) 或 De Novo 路径进军北美市场。
PM交付物: 数千页的《临床试验总结与安全性报告》、欧盟 CE 上市认证证书、《FDA 注册路径申请计划书》。
阶段六:商业化部署与上市后监督 (Commercialization & Post-Market)
时间节点: M31及以后
对于医疗硬件,卖出去仅仅是服务的开始。
学术营销:向医院院长和科室主任算一笔“医疗卫生经济学”账:降低X射线暴露、缩短手术时间、节省医保开支,证明产品的 ROI。
生命周期安全:建立上市后监控机制 (PMS),定期推送固件更新,防御新出现的入侵威胁,死守患者隐私底线。
PM交付物:商业化正式版本、OTA更新包、《上市后网络安全审计报告》。
三、医疗机器人开发的“绝对红线”(避坑指南)
如果在互联网赛道试错,代价是跳出率下降;在医疗赛道试错,代价是执业吊销甚至医疗事故。
- “延迟红线”不可存侥幸: 网络波动可能导致动作滞后。系统必须设计“断流刹车”冗余机制,一旦延迟超过阈值,机械臂瞬间锁定,严禁算法“预测”移动。
- “自主性红线”不可越界: 无论AI多强大,必须保持“医生在环(Human-in-the-loop)”架构。机器人永远是辅助执行者,最终按下“确认置入”按钮的必须是执业医师。
- “数据隐私红线”不可裸奔: 患者数据必须实施“端到端强加密”。产品架构必须默认支持局域网离线运作模式,以应对极端断网情况。
- “无意义的堆料”不可取: 手术主界面严禁放置与当前步骤无关的华丽图表。手术室的 UI/UX 法则第一条:克制、聚焦、高容错。
四、方法论交付——从0到1操盘医疗机器人的“PM 4C法则”
作为读者,如果你明天就要接手一个医疗器械的0-1项目,请遵循以下指南:
第一步:明确临床价值 (Clinical Value) —— 找准“为什么要做”
走出办公室,旁观20台手术。它必须能把60分的基层医生,赋能到85分的水平,而不是花几百万把95分做到96分。
第二步:攻克核心技术 (Core Technology) —— 厘清“能不能做”
不要一开始大而全。先做一个单一动作的 PoC 原型。学会借力外脑,技术整合能力比闭门造车更重要。
第三步:死守合规底线 (Compliance) —— 跨越“准不准做”
项目立项的第一天 (Day 1) 就把法规团队 (RA/QA) 拉进来。“所有未被记录的测试,等于没有发生”,把合规前置能省下至少一年的返工时间。
第四步:规划商业化路径 (Commercialization) —— 思考“怎么卖出去”
了解买单方。在产品设计中加入“降本数据输出”功能,用真实的数据报表去支撑你的商业定价。
结语
脊柱手术机器人的开发,是一场没有捷径的马拉松。它要求产品经理必须兼具极客的创新胆识、工程师的严谨逻辑,以及对生命的绝对敬畏。每一台设备、优化的每一行算法,都将在未来的某一天实实在在地拯救一个即将滑向深渊的脊柱,以及其背后的家庭。这就是智慧医疗硬件产品经理,最极致的浪漫与荣光。
本文由 @Jesco Chen 原创发布于人人都是产品经理。未经作者许可,禁止转载
题图来自Unsplash,基于CC0协议






- 目前还没评论,等你发挥!


