
 起点课堂会员权益
起点课堂会员权益AI智能体从简单到复杂的五大类型深度解析
智能体技术正在彻底改写软件工程的底层逻辑。从简单反射到学习型智能体,五大类型构建出一套从低级到高级的技术谱系,而其感知-推理-执行的闭环架构正在与LLM深度融合。本文将深度解析智能体的技术演进、核心架构与商业应用,揭示这场从自动化工具向数字化劳动力的范式转变。

一、技术演进:从传统程序到智能体的跨越
1.1 传统软件的三大困境
- 适应性差:严格遵循硬编码规则,无法应对环境动态变化
- 无记忆能力:决策仅基于当前状态,无法从历史经验优化
- 目标单一:仅能完成明确定义任务,缺乏多目标权衡能力
1.2 智能体的技术突破
核心架构:感知-推理-执行闭环
环境Environmen → 传感器Sensors → 感知Percepts → 智能体内部逻辑 → 执行器Actuators → 动作Actions → 环境
四大核心创新:
感知层:通过多模态传感器(摄像头、麦克风、传感器)持续监测环境
推理层:基于感知数据和内部模型进行决策
执行层:通过执行器将决策转化为实际动作
反馈机制:动作影响环境,形成新的感知输入,构成闭环
使得智能体能够,自主感知:实时捕捉环境变化
动态决策:根据当前状态和历史经验选择最优行动
持续学习:从交互结果中优化决策策略
1.3 分类标准的理论基础
基于Russell和Norvig《人工智能:一种现代方法》的三大维度:
- 智能程度:从条件反射到自主学习
- 内部状态:是否维护世界模型与历史记忆
- 决策机制:规则驱动、目标驱动或效用优化
这五种类型——简单反射、模型反射、目标导向、效用优化、学习智能体——构成了从低级到高级的完整技术谱系,每一层都是对前一层能力的扩展和深化。
二、核心解析:五大智能体类型深度剖析
2.1 技术架构总览
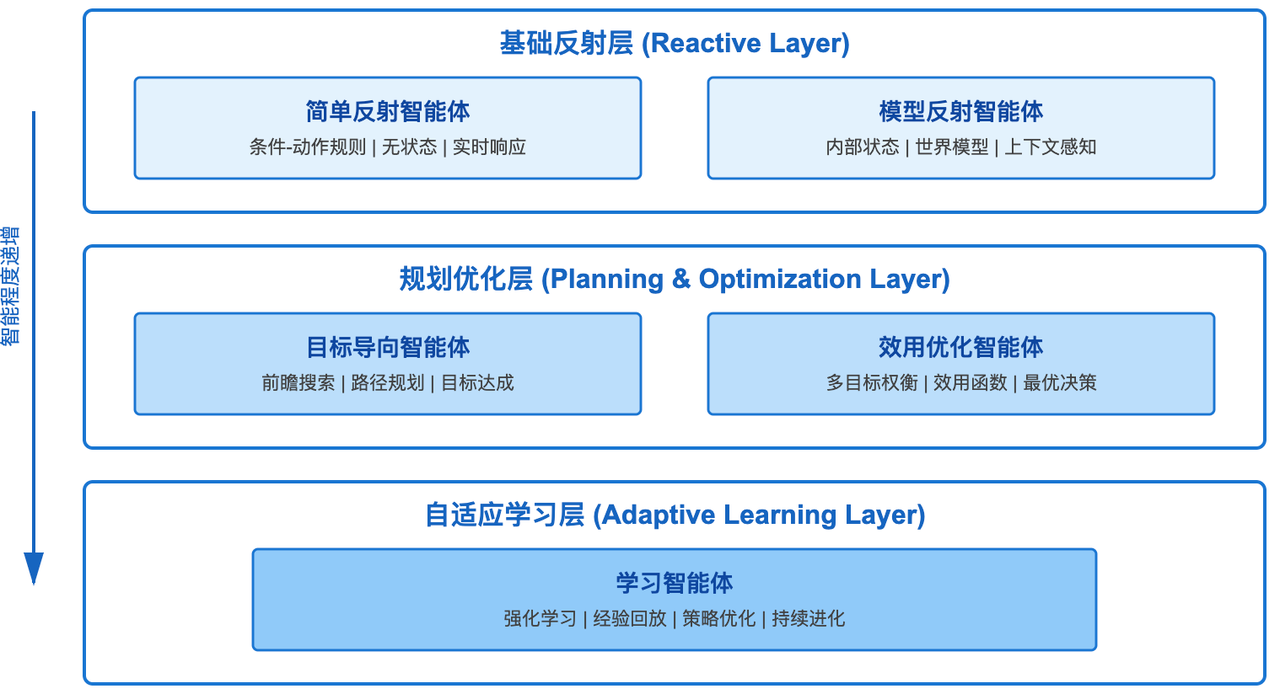
基础反射层:简单反射和模型反射智能体,提供快速响应和状态维护能力
规划优化层:目标导向和效用优化智能体,实现前瞻规划和多目标权衡
自适应学习层:学习智能体,通过经验积累实现持续进化
2.2 各类型深度解析
类型一:简单反射智能体
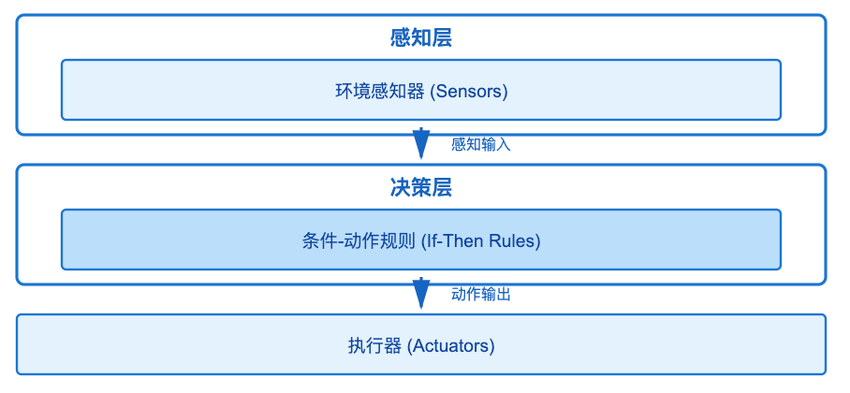
核心架构:条件-动作规则(If-Then Rules)驱动
技术特征:无状态设计、即时响应(毫秒级)、确定性行为
典型案例:恒温器-简单传感器
局限性:缺乏记忆与适应能力,动态场景表现差
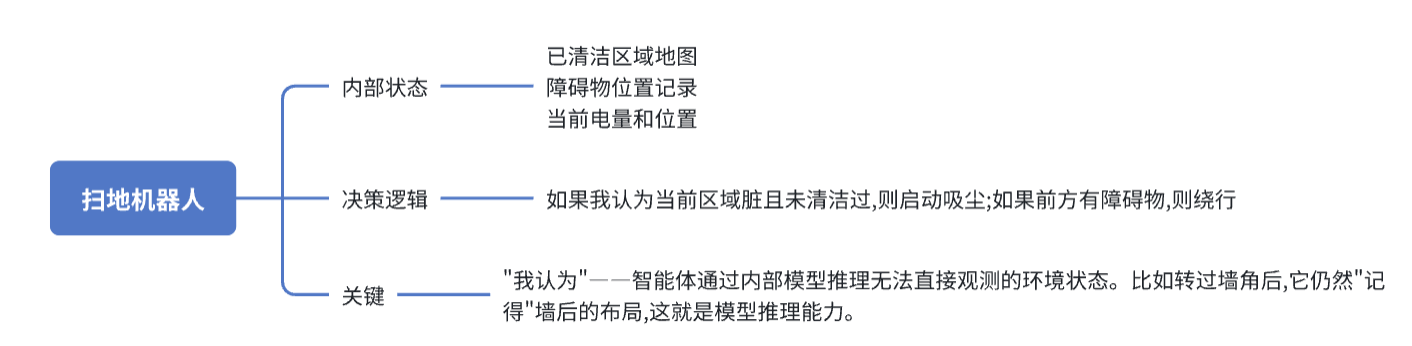
类型二:模型反射智能体
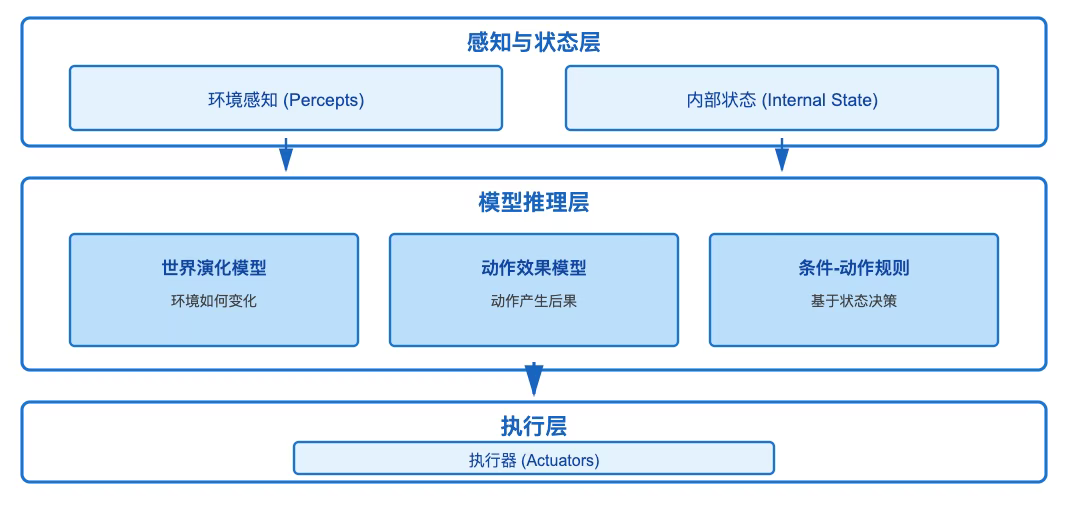
架构升级:新增内部状态存储与世界模型推理
核心能力:记忆历史行为、预测环境变化、推理动作后果
典型案例:
对比优势:相比简单反射,具备记忆与推理能力,适应性中等
类型三:目标导向智能体
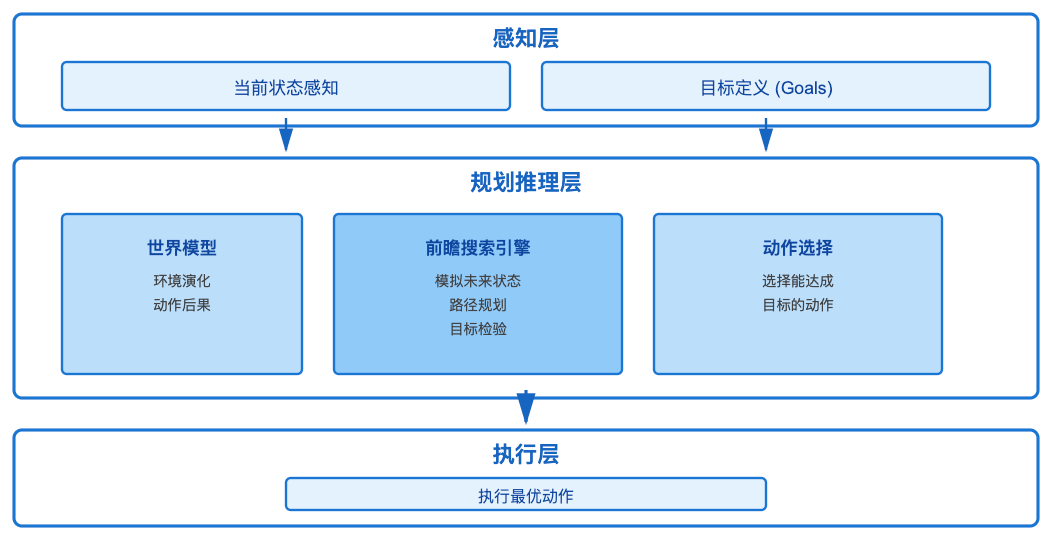
决策范式:从”匹配条件→执行动作”转向”模拟未来→选择路径”
核心机制:目标定义→前瞻搜索→路径规划→目标检验
典型案例:
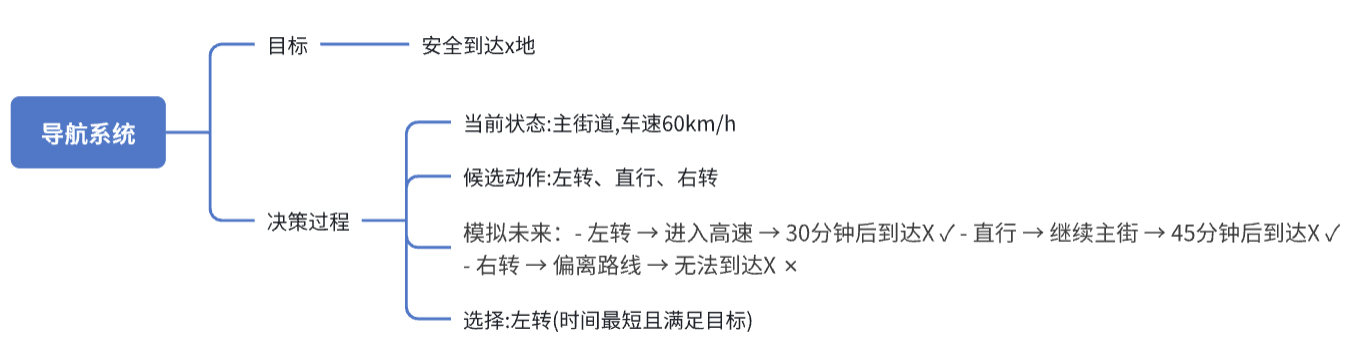
核心优势:具备规划能力,可牺牲短期利益换取长期目标
类型四:效用优化智能体
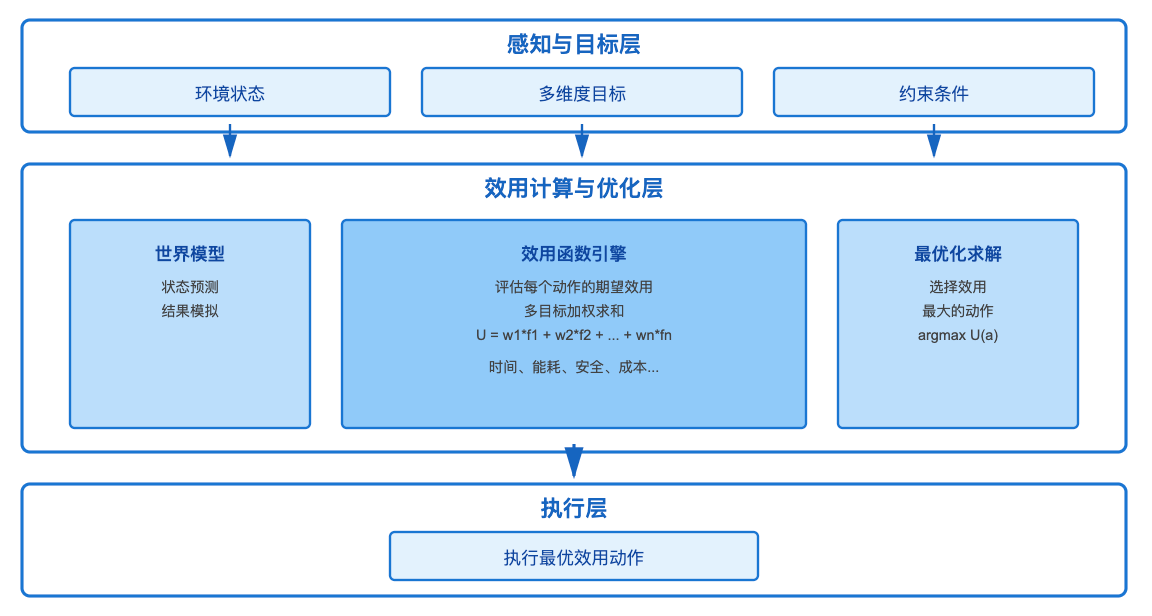
优化维度:从”能否达成目标”到”哪种方式最优”
核心机制:通过效用函数实现多目标加权优化
典型案例:无人机配送系统需要在多维度(速度、能耗、安全、天气)多维度优化选择”综合评分最高的路径”——可能稍慢但更安全、更省电。
技术挑战:效用函数设计依赖专家知识,计算复杂度高
类型五:学习智能体
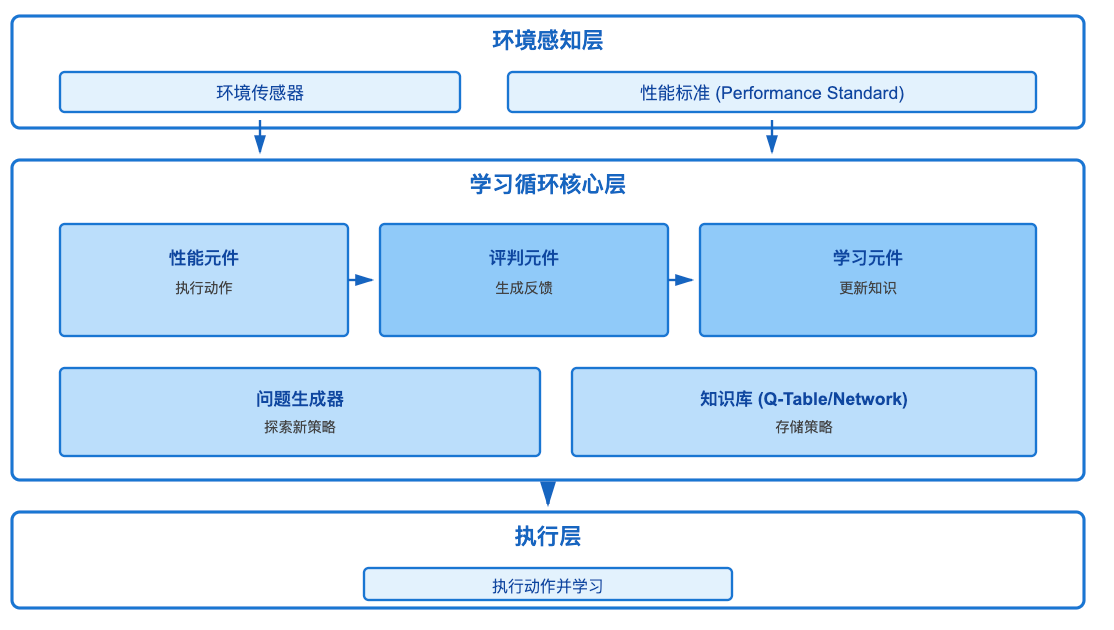
架构革命:包含性能元件、评判元件、学习元件、问题生成器四大组件
核心能力:从经验中自主学习、探索新策略、持续优化
典型案例:AlphaGo(通过数百万局自我对弈进化)
学习范式:监督学习(标注样本)、强化学习(环境反馈)、无监督学习(无标注数据)
三、架构揭秘:感知-推理-执行闭环体系
现代AI智能体的核心架构遵循标准化的三层模型,这种设计源自控制论和认知科学:
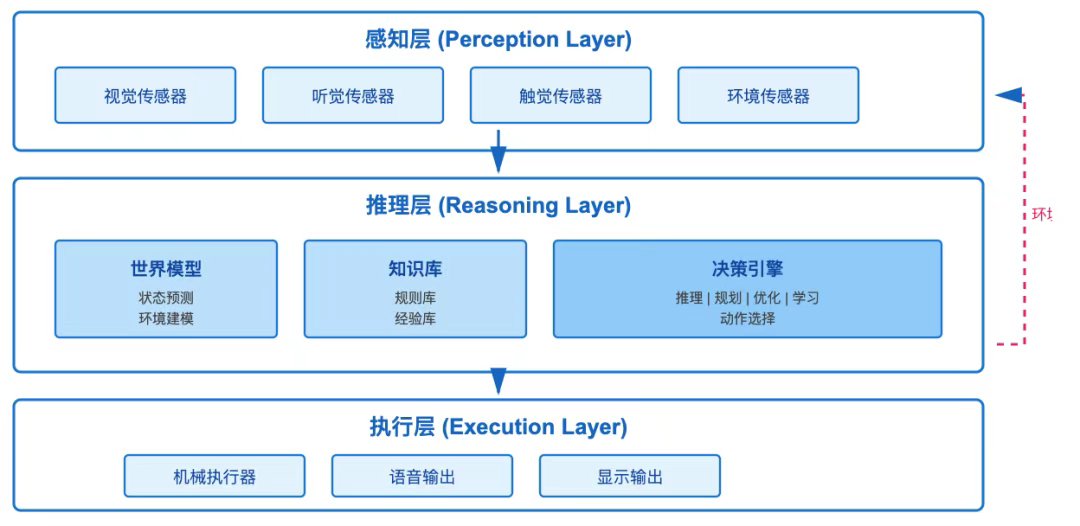
3.1 三层核心架构
感知层: 多模态数据融合
- 原始信号采集: 图像、声音、温度、位置
- 特征提取: 边缘检测、语音识别、异常检测
- 数据预处理: 降噪、归一化、时序对齐
- 技术栈: OpenCV、Librosa、传感器驱动
推理层:知识推理与决策
- 世界建模: SLAM地图构建、物理仿真
- 知识表示: 知识图谱、规则库、神经网络
- 决策算法: 搜索、优化、概率推理
- 技术栈: TensorFlow、PyTorch、规则引擎
执行层:动作生成与控制
- 动作规划: 路径规划、任务分解
- 运动控制: PID控制、力反馈
- 多执行器协调: 同步控制、冲突解决
- 技术栈: ROS、运动控制库
3.2 多智能体系统
多智能体架构:
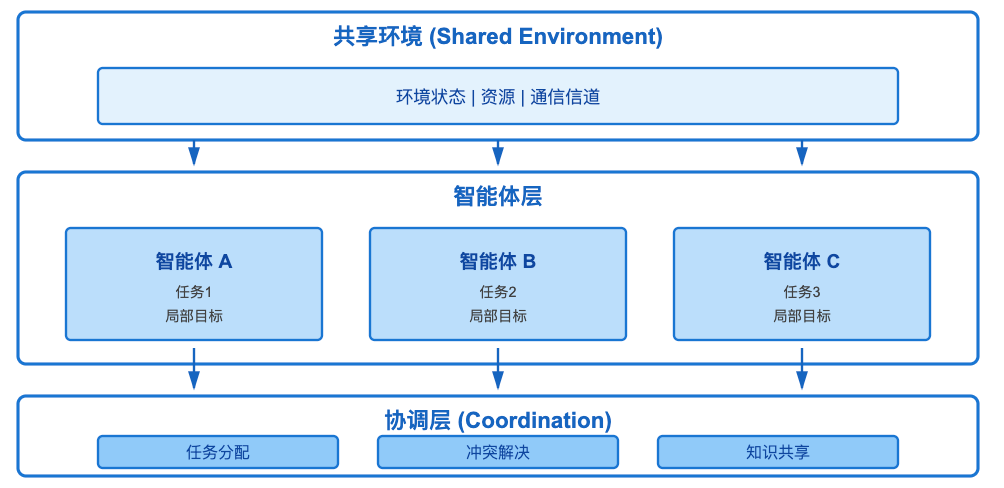
核心架构
共享环境→智能体层→协调层(任务分配、冲突解决、知识共享)
协作模式
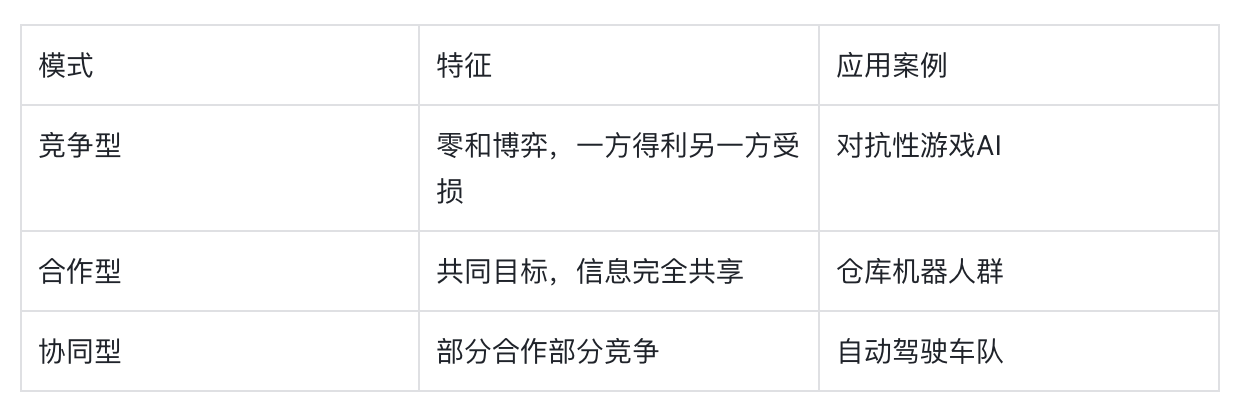
典型案例:
仓库机器人协同系统
场景:20台机器人在同一仓库内拣货
挑战:路径冲突:两台机器人同时要过窄道 – 任务分配:如何高效分配订单 – 充电调度:避免同时没电
解决方案
- 中央调度器:全局路径规划
- 拍卖机制:机器人竞标任务
- 预测性充电:基于任务预测电量需求
3.3 与生成式AI的融合
2025年最激动人心的趋势:大语言模型(LLM)作为智能体的”认知大脑”
随着大语言模型的深度融合和多智能体系统的成熟,AI智能体正在从实验室走向大规模商业应用。智能
体不再只是自动化工具,而是能够自主理解需求、规划任务、协同工作的数字化劳动力从自动驾驶到智能客服,
从工业质检到金融交易,智能体技术正在重塑各行各业的自动化范式。但我们也必须清醒认识到,当前智能体仍
需要”人类在回路”——人类监督仍是确保系统安全可靠的最后防线
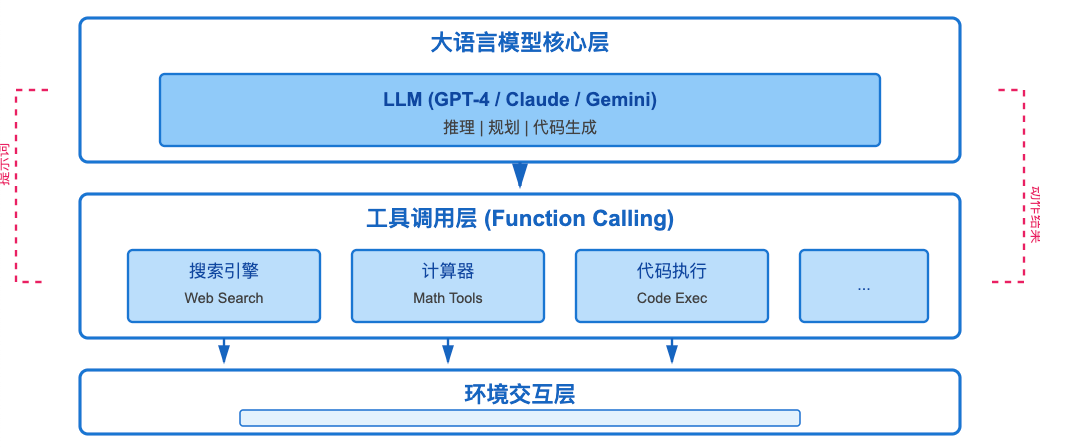
LLM驱动的智能体架构
大语言模型核心层→工具调用层→环境交互层
技术突破
- 推理能力:思维链实现复杂推理
- 工具使用:工具调用拓展能力边界
- 自然交互:可以通过自然语言指挥智能体
- 快速适应:小样本学习快速适应新任务
AutoGPT类智能体工作流程:
用户输入目标:”调研竞品并生成分析报告”
LLM分解任务:
子任务1:搜索竞品信息 – 子任务2:提取关键数据 – 子任务3:对比分析 – 子任务4:生成报告
自主执行:
调用搜索API – 调用数据提取工具 – 内部分析推理 – 调用文档生成工具
结果验证与迭代优化
四、未来展望:智能体技术发展趋势
5.1 关键技术突破方向
- 可信赖AI:提升透明性与可解释性
- 小样本学习:减少数据依赖
- 安全约束学习:规避探索过程中的风险行为
- 人机协同:优化人类与智能体的协作模式
5.2 长期发展愿景
- 从自动化工具升级为数字化劳动力
- 自主理解需求、规划任务、协同工作
- 增强人类能力,聚焦创造性工作
本文由 @独屿~ 原创发布于人人都是产品经理。未经作者许可,禁止转载
题图来自Unsplash,基于CC0协议






- 目前还没评论,等你发挥!


