
 起点课堂会员权益
起点课堂会员权益从“像素”到“足端”,机器狗如何看懂三维世界?
宇树 Go2 四足机器人的相机标定究竟有何奥秘?从认识硬件到内参外参解密,再到张氏标定法的运用,本文为您详细拆解其从 2D 照片到 3D 空间认知的转化链路。
传感器标定是连接物理世界与数字感知的核心中间件,对于Go2这种高速运动的四足机器人,如果标定偏差1度,反映在地形映射上可能就是几厘米的误差,足以导致机器狗在复杂地形下踏空或撞击。
本文通过Zoogle联系到了ZPD警校,组织了一场相机标定培训课,拆解从“像素”到“足端控制”的转换链路。
你的机器人搭档如何“看”世界?
“听好了,警员们!”
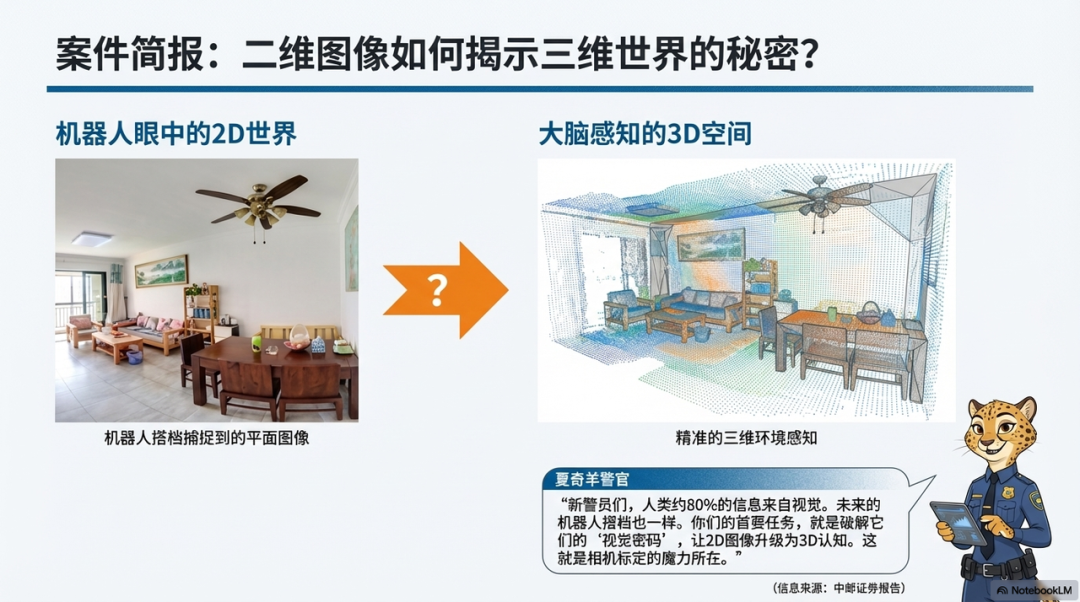
人类获取的信息中,80%来自视觉。但在机器人的世界里,未经调教的摄像头只是一只“会撒谎的眼睛”。
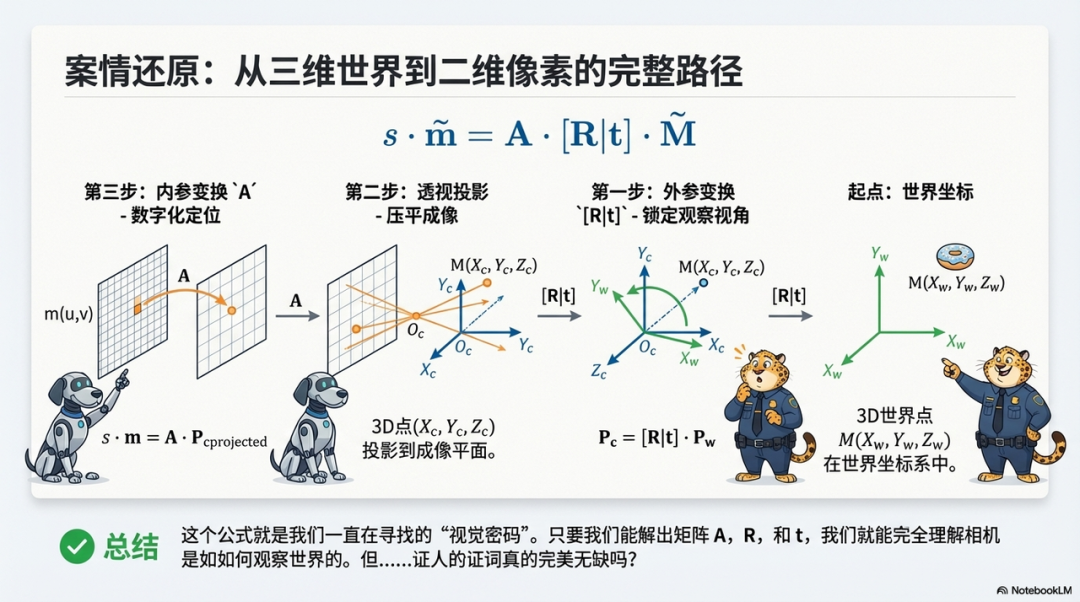
今天,我们将拆解ZPD最新配发的巡逻搭档——宇树 Go2。你们的任务只有一个:破解它的视觉密码,搞清楚它是如何将一张张扁平的2D照片,转化为精准的3D空间认知的。
这门课的名字叫——相机标定 (Camera Calibration)。
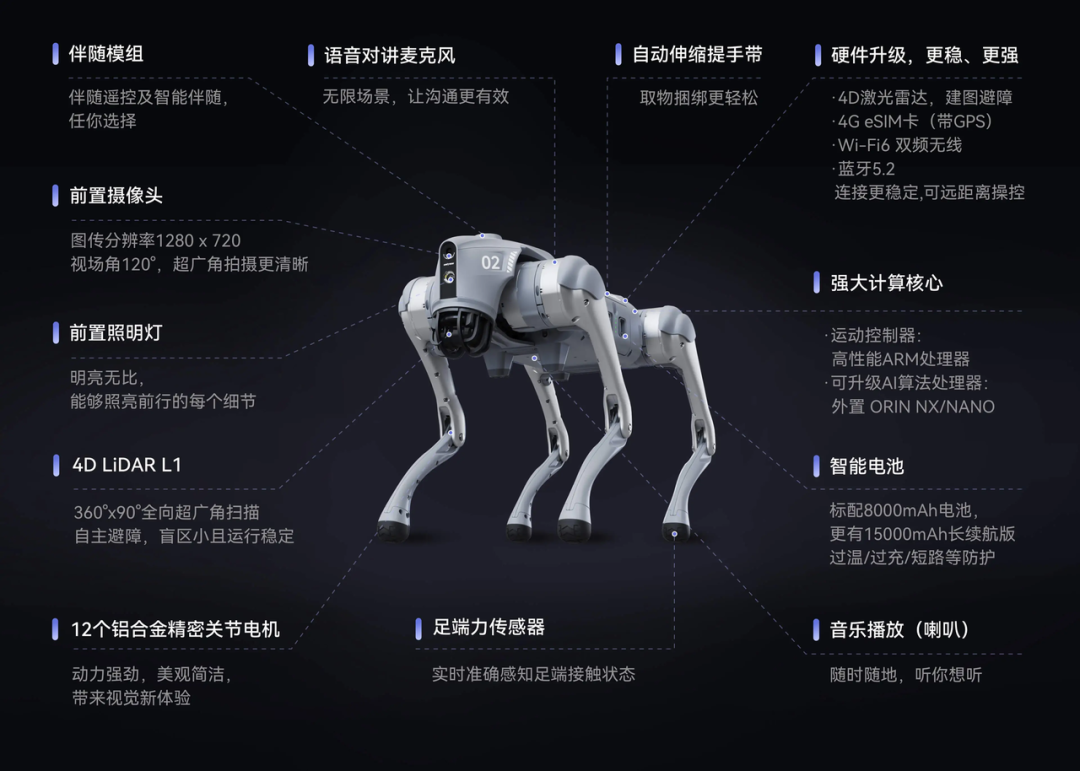
1.警械拆解:认识你的“五官” (The Hardware)
先来看看你们的搭档。根据后勤科提供的图纸,Go2 不仅仅是一堆金属,它是一座行走的传感器堡垒:
核心痛点:
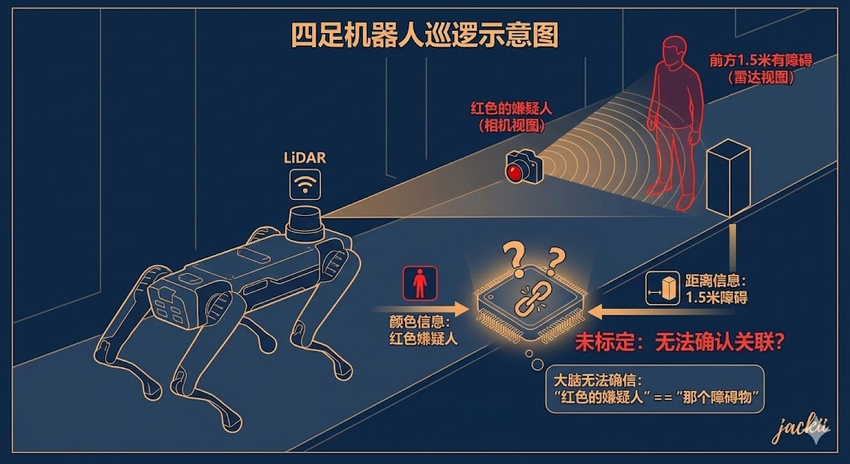
相机看到了“红色的嫌疑人”(颜色信息),雷达看到了“前方1.5米有障碍”(距离信息)。但如果没有标定,Go2的大脑无法确信“红色的嫌疑人”就是“那个障碍物”。
2.第一层解密:内参 (Intrinsics) —— 修正“畸变的证词”
“永远不要轻信广角镜头!”
为了在巡逻时获得更大的视野,Go2 装备了120° 超广角镜头。但这带来了一个副作用:透镜畸变。
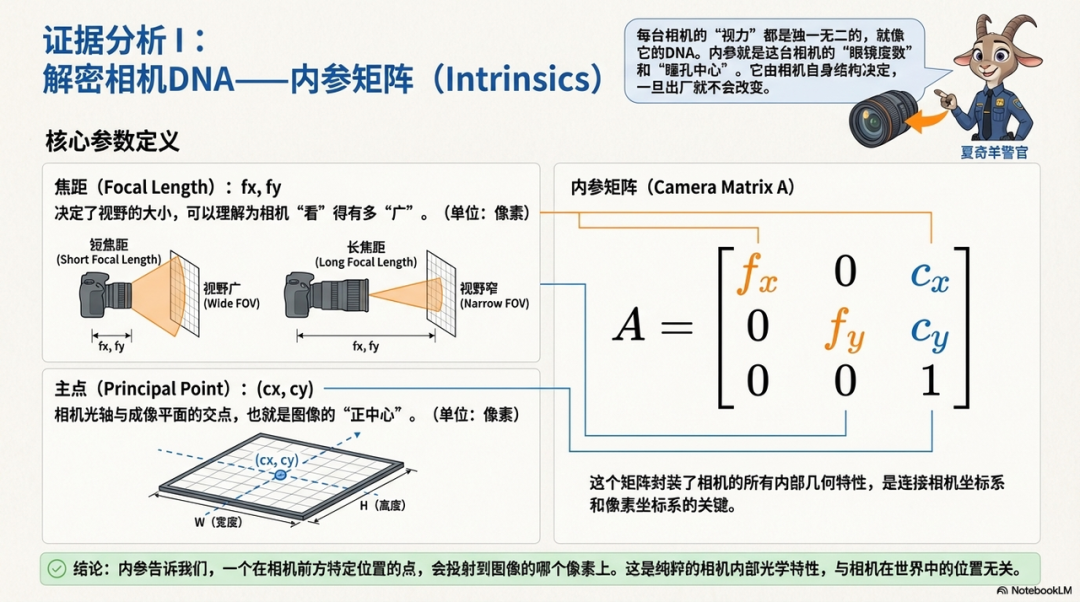
就像你在哈哈镜里看到的一样,直线变弯了,世界鼓起来了(桶形畸变)。如果直接用这张图导航,Go2 走直路也会撞墙。我们需要查清相机的“DNA”——内参矩阵:
- 焦距:决定了相机视野的广度。
- 主点 :修正视网膜中心的制造误差。
- 畸变系数 :这是一个数学公式,用来把弯曲的图像“拉直”,还原现场真相。
知识点:内参是相机与生俱来的属性,一旦出厂(除非变焦)就不会改变。

3.第二层解密:外参 (Extrinsics) —— 统一“坐标系”
“你在哪?往哪看?”
这是最关键的一步。Go2 的“眼睛”(相机)长在鼻子上,但“触角”(雷达)长在头顶。我们需要建立一个统一的世界坐标系。
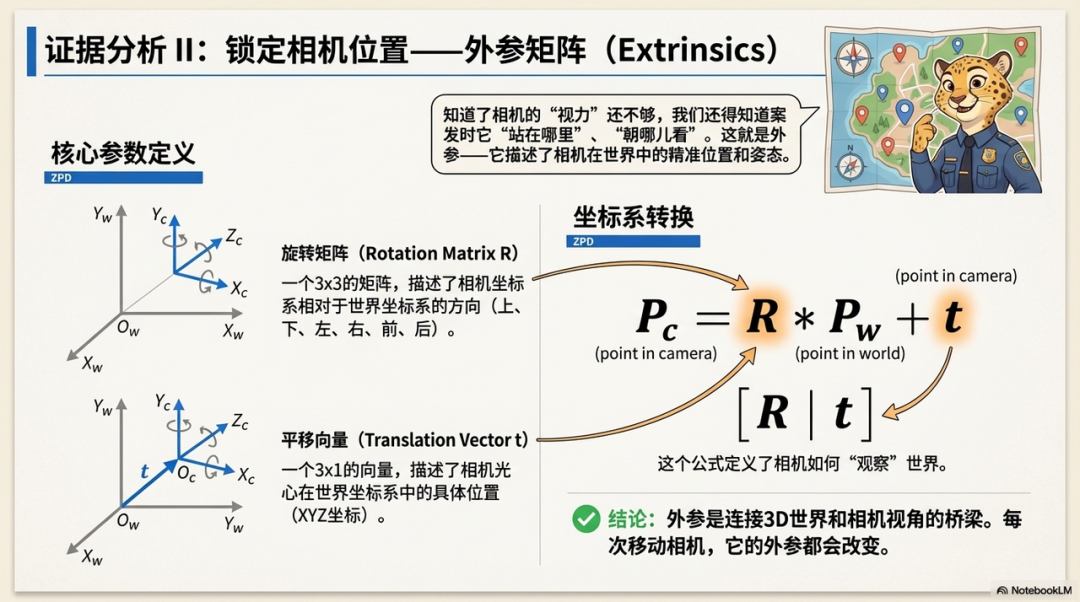
我们需要计算外参矩阵[R|t]:
- 旋转矩阵 (Rotation, R):描述相机相对于雷达(或基座)低头了多少度,向左偏了多少度 。
- 平移向量 (Translation, t):描述相机中心距离雷达中心在X、Y、Z轴上各偏离了多少毫米。
4.终极手段:张氏标定法
“我们需要一个标准,一个不会说谎的参照物。”
如何获取这些复杂的参数?我们不需要昂贵的实验室,只需要警局顾问张正友博士 (Dr. Zhengyou Zhang)推荐的神器——黑白棋盘格 (Checkerboard)。
操作流程:
- 举证:让 Go2 盯着棋盘格,从不同角度拍摄 10-20 张照片。
- 推理:算法知道棋盘格的真实物理尺寸(比如每格 3cm)。
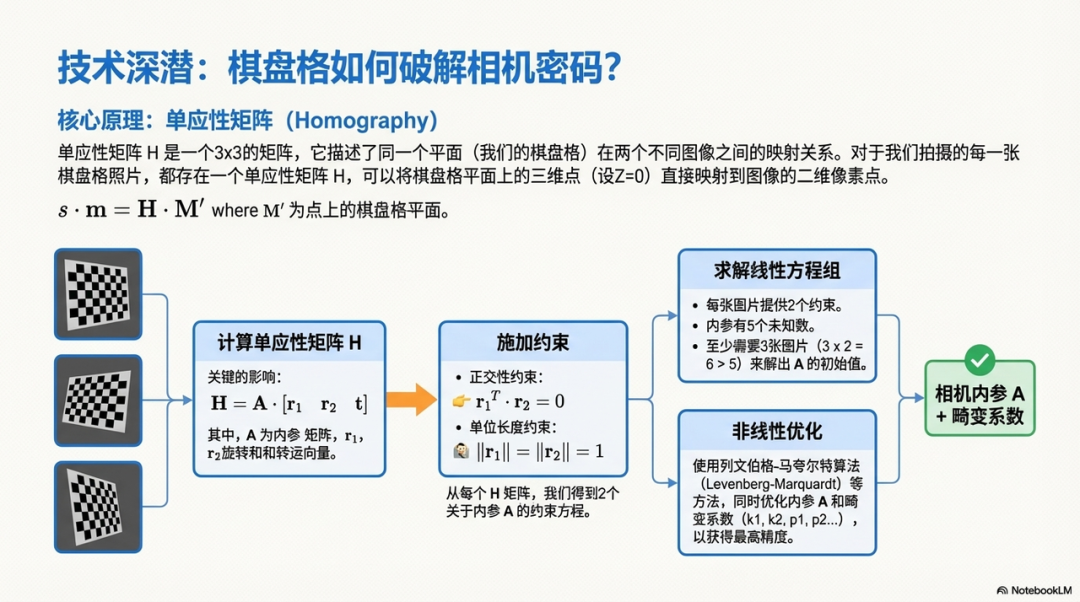
- 解算:通过对比“图像上的格子”和“真实的格子”之间的形变,利用单应性矩阵 (Homography),算法能一次性反推出相机的内参、畸变参数和每一张照片对应的外参。
结业陈词
新警员们,请记住:
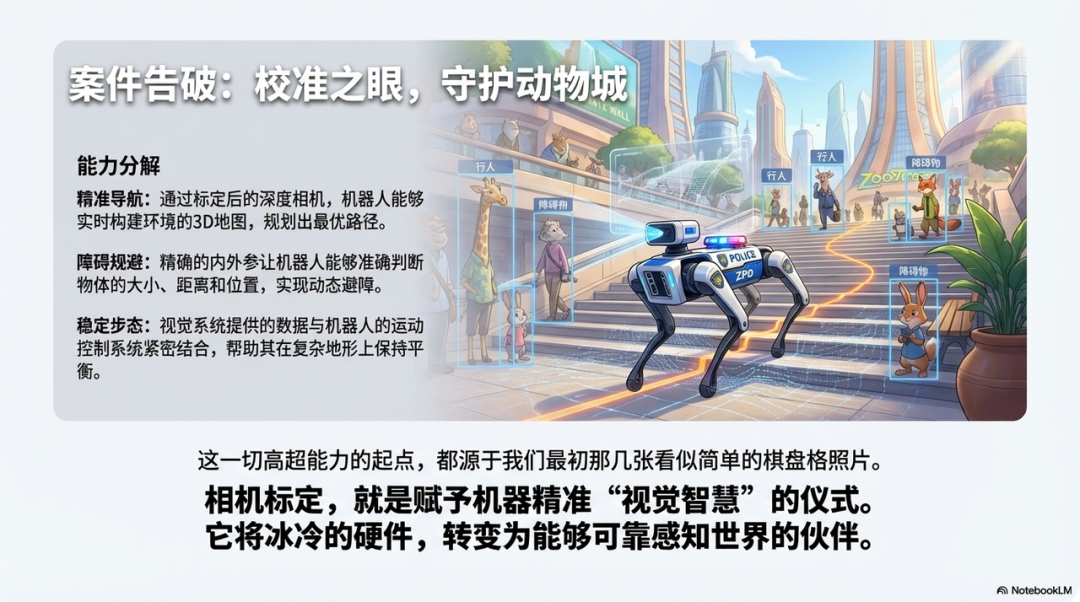
一个未经标定的相机,只是一只模糊的“近视眼”;而一个经过精确标定的传感器系统,才是一双能洞察三维世界的“鹰眼”。
通过标定,能将视觉的色彩与雷达的深度完美融合。它不再会在追捕罪犯时被台阶绊倒,也不会把墙上的海报误认为是真实的大门。
散会!
本文由 @杰克说AI 原创发布于人人都是产品经理。未经作者许可,禁止转载
题图来自Unsplash,基于CC0协议






- 目前还没评论,等你发挥!


