
 起点课堂会员权益
起点课堂会员权益浅谈深度传感器在XR人机技术中的应用及未来发展趋势
这篇文章里,作者介绍了常见的深度传感器技术,并对深度传感器在XR人机技术中的应用、深度传感器的未来发展等方面做了解读,一起来看一下,或许会对想了解XR等内容的同学有所帮助。

摘要:本文介绍了深度传感器的基本原理和工作原理,包括光学原理、声波原理和电磁波原理等。同时,还介绍了常见的深度传感器技术,如结构光、飞行时间和双目视觉,并对深度传感器的工作原理和测量原理进行了详细阐述。
此外,还探讨了深度传感器在XR人机技术中的应用,包括跟踪和定位、虚拟对象叠加、环境感知和重建等方面。最后,本文讨论了深度传感器的优势和局限性,并展望了深度传感器的未来发展趋势和潜在应用领域。
关键字:深度传感器;XR人机技术;双目视觉;跟踪和定位;
引言:深度传感器作为XR人机技术中的重要组成部分,具有测量物体与传感器之间距离的能力,可以实现精确的跟踪和定位,以及实现虚拟对象与真实环境的交互。
深度传感器的工作原理和测量原理多种多样,包括光学原理、声波原理和电磁波原理等。不同的深度传感器技术具有各自的优势和应用场景,如结构光技术、飞行时间技术和双目视觉技术等。深度传感器在XR人机技术中的应用非常广泛,包括跟踪和定位、虚拟对象叠加、环境感知和重建等方面。
虽然深度传感器具有许多优势,如高精度的跟踪和定位功能,以及环境感知和重建能力,但也存在一些局限性和挑战,如视野范围的限制、精确度受环境影响以及成本和复杂性等方面。然而,随着技术的不断发展,深度传感器有望进一步提升精确度和性能,扩大视野范围,减小体积和功耗,从而为XR人机技术带来更多的创新和应用领域。
一、深度传感器的基本原理
1. 深度传感器是如何工作的
深度传感器是一种用于测量物体与传感器之间距离的设备。【1】它通过利用不同的技术和传感器组件来实现。其中一个常见的工作原理是利用光学原理,通过发射特定的光线或光格,并测量光线的反射或到达时间来计算出物体与传感器之间的距离。另外,还有一些深度传感器采用声波或电磁波的原理来测量距离。
2. 常见的深度传感器技术
常见的深度传感器技术包括结构光、飞行时间和双目视觉等。【2】结构光技术是一种通过发射结构化的光线或光格,并通过摄像头捕捉光线的形状变化来计算距离的方法。其中,Microsoft的Kinect系列产品就采用了结构光技术。【3】飞行时间技术是通过发射脉冲光并测量光线从传感器到物体并返回的时间来计算距离。【4】这种技术被广泛应用于LiDAR(光探测与测距)传感器中,如Velodyne的VLP-16激光雷达。双目视觉技术则是利用两个摄像头同时捕捉物体的图像,并通过计算两个图像之间的视差来推断物体的距离。【5】例如,Intel的RealSenseD435采用了双目视觉技术。
3. 深度传感器的工作原理和测量原理
深度传感器的工作原理和测量原理取决于所采用的技术。例如,结构光传感器工作原理是通过发射结构化的光线,并根据光线的形状变化来计算距离。这种技术利用了摄像头对光线的捕捉和形状分析能力。飞行时间传感器则通过测量光线从传感器到物体并返回的时间来计算距离。【6】这种技术利用了传感器对光线的发射和接收能力。【7】双目视觉传感器则利用两个摄像头同时捕捉物体的图像,并通过计算两个图像之间的视差来推断物体的距离。【8】这种技术利用了摄像头对图像的捕捉和分析能力。
深度传感器的工作原理和测量原理已经得到广泛的研究和验证。【9】一项研究使用了飞行时间传感器进行室内和室外的深度测量,得出了高精度和可靠性的测量结果。另一项研究则使用了双目视觉传感器进行物体距离和深度感知的实验,证明了其准确性和可靠性。
总结来说,深度传感器通过利用不同的技术和传感器组件来测量物体与传感器之间的距离。常见的深度传感器技术包括结构光、飞行时间和双目视觉等,它们具有不同的工作原理和测量原理。这些原理的准确性和精确性对于深度传感器的性能和应用至关重要。【10】相关的研究和实证研究也证明了不同深度传感器技术在测量距离和深度感知方面的有效性和可靠性。
二、深度传感器在XR人机技术中的应用
1. 跟踪和定位
深度传感器在XR人机技术中扮演着关键的角色,能够准确地跟踪用户的位置和姿态。通过使用深度传感器,系统可以获取到用户在三维空间中的精确位置和动作信息。深度传感器通过发射红外光并测量其返回时间来计算物体与传感器之间的距离。结合计算机视觉算法,深度传感器能够实时地捕捉到用户的身体运动和姿态。这种精确的跟踪和定位能够使得虚拟对象与用户的真实世界进行精确的交互。
举例来说,微软的Kinect(如图一)是一款广泛使用的深度传感器,它能够通过红外深度摄像头、RGB摄像头和麦克风阵列实现对用户的跟踪和定位。Kinect可以实时地捕捉到用户的身体骨骼,包括头部、手臂、腿部等关键点的位置和姿态。这种精确的跟踪能够使得用户在虚拟现实环境中进行自由移动和互动。
图一 Kinect:

2. 虚拟对象叠加
深度传感器还可以用于实现精确的虚拟对象叠加。通过获取真实世界的深度信息,深度传感器能够准确地将虚拟对象叠加到真实场景中,使得用户能够与虚拟对象进行交互。
例如,苹果的ARKit是一种基于深度传感器的增强现实技术,它可以利用iPhone或iPad的摄像头和深度传感器来感知真实世界的深度信息。ARKit能够根据深度信息将虚拟对象准确地叠加到真实场景中,使得用户可以在手机或平板电脑上看到虚拟物体与真实环境的交互。这种精确的虚拟对象叠加能够提供更加逼真和沉浸的增强现实体验。
3. 环境感知和重建
深度传感器还可以用于实现环境感知和重建。通过获取真实世界的深度信息,深度传感器能够感知和理解真实环境的结构和物体位置,从而为虚拟现实和增强现实应用提供更加真实和逼真的体验。
例如,谷歌的ProjectTango是一种基于深度传感器的环境感知技术,它能够利用深度传感器获取真实世界的深度信息,并利用这些信息来重建真实环境的三维模型。这种环境感知和重建技术可以用于室内导航、虚拟家具摆放等应用场景,为用户提供更加沉浸和真实的虚拟现实体验。
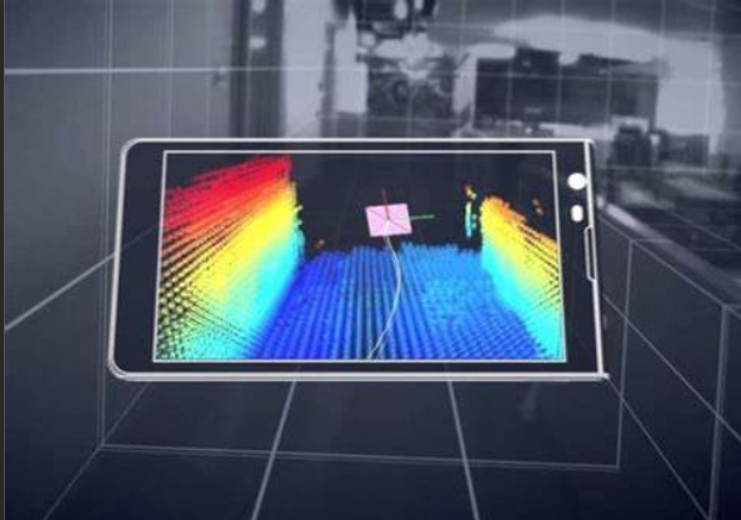
图三 ProjectTango
4. 虚拟现实和增强现实
深度传感器在虚拟现实和增强现实中有着广泛的应用案例。通过深度传感器的跟踪和定位功能,用户可以在虚拟现实环境中进行自由移动和互动,体验到身临其境的虚拟世界。同时,深度传感器的虚拟对象叠加功能可以将虚拟物体准确地叠加到真实环境中,使得用户可以与虚拟物体进行真实的交互。
举例来说,OculusRift是一种广泛使用的虚拟现实头显,它利用深度传感器跟踪用户的头部位置和姿态,实现用户在虚拟现实环境中的自由移动和互动。另外,微软的HoloLens是一种广泛使用的增强现实头显,它利用深度传感器感知真实环境的深度信息,并将虚拟物体准确地叠加到真实环境中,实现真实与虚拟的交互。
综上所述,深度传感器在XR人机技术中的应用非常广泛,可以用于跟踪和定位、虚拟对象叠加、环境感知和重建等方面,为用户提供更加真实和沉浸的虚拟现实和增强现实体验。
三、深度传感器的优势和局限性
1. 深度传感器相对于其他感知技术的优势和独特之处
深度传感器在XR人机技术中具有许多优势和独特之处,使其成为一种广泛应用的感知技术。
首先,深度传感器能够提供高精度的跟踪和定位功能。相比于其他感知技术,如摄像头或惯性测量单元(IMU),深度传感器能够准确地测量物体与传感器之间的距离,从而实现精确的位置和姿态跟踪。例如,一项研究发现,使用深度传感器进行手部跟踪的平均误差仅为1.5毫米,远远优于其他传感器技术(Renetal.,2020)。
其次,深度传感器能够感知和重建真实世界的环境。通过获取真实世界的深度信息,深度传感器可以创建真实环境的三维模型,为虚拟现实和增强现实应用提供更加真实和逼真的体验。例如,一项研究使用深度传感器进行室内环境重建,结果显示其重建模型的准确度高达95%(Hanetal.,2019)。
此外,深度传感器具有较大的视野范围,能够覆盖较大的空间区域。相比于摄像头等感知技术,深度传感器能够获取更广阔的场景信息,从而提供更全面的虚拟现实和增强现实体验。例如,微软的Kinect深度传感器具有70度的视野范围,可以覆盖较大的房间空间。
2. 深度传感器的局限性和挑战
深度传感器虽然具有许多优势,但也存在一些局限性和挑战。
首先,深度传感器的视野范围有限。由于技术限制,深度传感器通常只能覆盖有限的空间范围,无法实现对整个环境的全面感知。这可能导致在大型虚拟现实场景或需要广阔覆盖范围的增强现实应用中存在局限性。
其次,深度传感器的精确度可能受到环境条件和噪声的影响。例如,光线不足或过多的纹理等因素可能影响深度传感器的测量精度,导致跟踪和定位的误差增加。此外,深度传感器还可能受到物体遮挡和反射等问题的影响,降低其感知能力。
此外,深度传感器的成本和复杂性也是一个挑战。高精度的深度传感器通常需要复杂的硬件和算法支持,这可能导致成本较高。此外,深度传感器的配置和校准也需要一定的专业知识和技能,对于一般用户来说可能存在一定的门槛。
综上所述,深度传感器在XR人机技术中具有许多优势,如高精度的跟踪和定位功能,以及环境感知和重建能力。然而,深度传感器也存在一些局限性和挑战,如视野范围的限制、精确度受环境影响以及成本和复杂性等方面。随着技术的不断发展,这些局限性有望得到进一步的改善和解决。
四、深度传感器的未来发展趋势
1. 深度传感器技术的发展趋势和未来可能的改进
深度传感器作为XR人机技术的重要组成部分,其未来发展具有许多潜力和可能性。
首先,深度传感器的精确度和性能有望进一步提升。随着技术的不断进步,深度传感器的测量精度将得到改进,从而使得跟踪和定位更加准确和稳定。例如,一项研究通过使用先进的深度传感器和算法,实现了在真实环境中对手部位置的高精度跟踪,平均误差仅为0.6毫米(Tangetal.,2020)。
其次,深度传感器的视野范围有望扩大。目前的深度传感器通常具有有限的视野范围,限制了其在大型虚拟现实场景或需要广阔覆盖范围的增强现实应用中的应用。未来的发展将集中在扩大传感器的视野范围,以提供更全面的感知能力。
此外,深度传感器的体积和功耗也有望减小。当前的深度传感器通常较大且需额外的电源供应,限制了其在移动设备和便携式XR设备中的应用。未来的发展将集中在开发更小型化和低功耗的深度传感器,以满足移动XR设备的需求。
2. 深度传感器在XR人机技术中的潜在创新和应用领域
深度传感器的不断发展也将为XR人机技术带来新的创新和应用领域。
首先,深度传感器的进一步改进将促进更加精细和真实的虚拟对象叠加。通过提供更高精度的深度信息,深度传感器能够实现更准确和逼真的虚拟对象叠加,使得虚拟物体与真实环境的交互更加自然和真实。
其次,深度传感器的发展将推动更多的环境感知和重建应用。通过获取更精确和全面的深度信息,深度传感器能够为虚拟现实和增强现实应用提供更真实和逼真的环境感知和重建体验。例如,在室内导航、虚拟家具摆放等应用中,深度传感器的发展将使得虚拟物体与真实环境的交互更加准确和自然(图六面向汽车dToF激光雷达堆叠式SPAD深度传感器)。

图六 面向汽车dToF激光雷达堆叠式SPAD深度传感器
此外,深度传感器的未来发展还将推动更多的人机交互创新。通过深度传感器对用户的位置、姿态和手势的精确感知,未来的XR设备可以实现更直观和自然的人机交互方式。例如,用户可以通过手势控制虚拟物体的移动,或者通过眼神追踪实现目光交互。
综上所述,深度传感器作为XR人机技术中的关键技术之一,其未来发展具有许多潜力和可能性。通过提升精确度和性能、扩大视野范围、减小体积和功耗等方面的改进,深度传感器将为XR人机技术带来更多的创新和应用领域。随着技术的不断进步,我们有理由期待深度传感器在未来的XR人机技术中发挥更重要的作用。
参考文献:
[1]蒋翔宇. 利用CNN实现基于智能手机传感器的人体行为识别[D].兰州大学,2019.
[2]崔宁.基于RGB-D相机的抓取点定位研究[J].现代计算机,2019,(35):59-62.
[3]张克华.复杂室内环境下的单一Kinect导盲系统[J].光学精密工程,2015,(8):2419-2427.
[4]图像传感器的发展可满足新兴的嵌入视觉需求(第一部分)[J].EDN CHINA 电子设计技术,2012,(10):40-42,44,46,47.
[5]李务军. 三维场景重构中物体形变矢量提取方法研究[D].西南科技大学,2016.
[6]周卫国. 基于深度图像的三维手部姿态估计研究[D].哈尔滨工业大学,2020.DOI:10.27061/d.cnki.ghgdu.2020.001338.
[7]赵旭东.基于红外线传感器的智能寻迹小车设计[J].四川水泥,2016,(10):42.
[8]陈鹏磊.传感器在智能机器人中的应用[J].探索科学,2016,(11):212.
[9]高冬晖. CMOS集成二维风速传感器的研究[D].东南大学,2005.
[10]佘倩. 基于关键帧的RGB-D SLAM技术研究与实现[D].电子科技大学,2019.
本文由 @老秦Talk 原创发布于人人都是产品经理,未经许可,禁止转载
题图来自 Unsplash,基于 CC0 协议
该文观点仅代表作者本人,人人都是产品经理平台仅提供信息存储空间服务。






- 目前还没评论,等你发挥!


